
- 분류 전체보기 (293)

| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
- 회전 최소/최대
- 윤곽가공경로
- 체인옵션
- 회전수 파라미터
- 평면관리자
- 머시닝
- 절삭파라미터
- 선형배열
- 최소 회전수
- 정도레벨
- 마스터캠 모의가공
- 마스터캠
- 윤곽가공 파라미터
- 진입/복귀
- 멀티포스트
- 윤곽가공 탭
- 부가축가공
- 체인 옵션
- 대기툴
- 2D가공경로
- 머신 시뮬레이션
- CHAIN OPTION
- 5축 시뮬
- i/o채널
- 스핀들 파라미터
- 윤곽가공
- 틸팅인덱스
- 곡면 고속가공경로
- Weterline
- 포스트수정
- Today
- Total
언젠가 반드시 모모가
머시닝 관련 초 기초사항 익히기 과정 - 08(아쿠센터 사용 방법-2) 본문
저번에 이어 아큐센터 사용법을 설명합니다.
현재 아큐센터를 홀더에 체결하여 스핀들에 고정후 회전 실행 과정까지 지나왔습니다.
그 후 바이스에 물린 소재의 외곽을 측정하여 소재원점으로 워크좌표(G54)에 입력하는 것을 설명하겠습니다.
먼저 해당 소재를 고정구(바이스)에 고정합니다.

그리고 마스터켐에서 설정한 소재원점(가공원점)를 확인합니다.

*예제에서는 소재 왼쪽상단 모서리을 지정합니다.
* 다시 설명하겠지만 이러한 소재 원점은 특별히 어떠한 정답이 있는 것이 아니고 사용자 습관과 마스터캠상의 가공도형요소 배치위치 또는 좌표값생성 관련상 사용자 특성에 따라 결정됩니다.
* 바이스 스톱버위치 (좌,우측)는 보통 다음과 같은 논리로 결정됩니다.
1. 머시닝 관련 교육시 초기 교육내용에 많이 따라갑니다.
(처음 가공을 접할때(가공을먼저 하거나 마스터캠 교육을 먼저 하거나... 등) 초기 교육내용에 스톱버를 고정한 위치에 따라 후에도 계속 습관성으로 따라가는 경우가 있습니다.)
2. 스톱버 고정(볼트체결)시 사용자 손습관에 따라 결정됩니다.
(스톱버 고정시 우측에 있는 것이 볼트 체결홀이나 육각렌치등 시각적으로 보이는 위치에 놓고 쓰는 경우를 선호하십니다.... 경우에 따라서..)

3. 마스터캠 가공경로 생성시 제품의 거리 공차등 또는 공정상 소재원점(가공원점)이 좌, 우측에 설정되어 있는 경우

이외 등등... 여러 가지 이유로 소재원점 위치는 변동됩니다.
우선 예제에서는 스톱버가 좌측에 고정되고 소재원점이 좌측 상단에 설정되어 있다는 상황에서 진행합니다.
현재 스핀들의 고정된 아큐센터가 회전(600~800 정도)되어 있는 상태에서 우선 조작반 화면을 POS(포스 : POSITION)로 전환합니다.

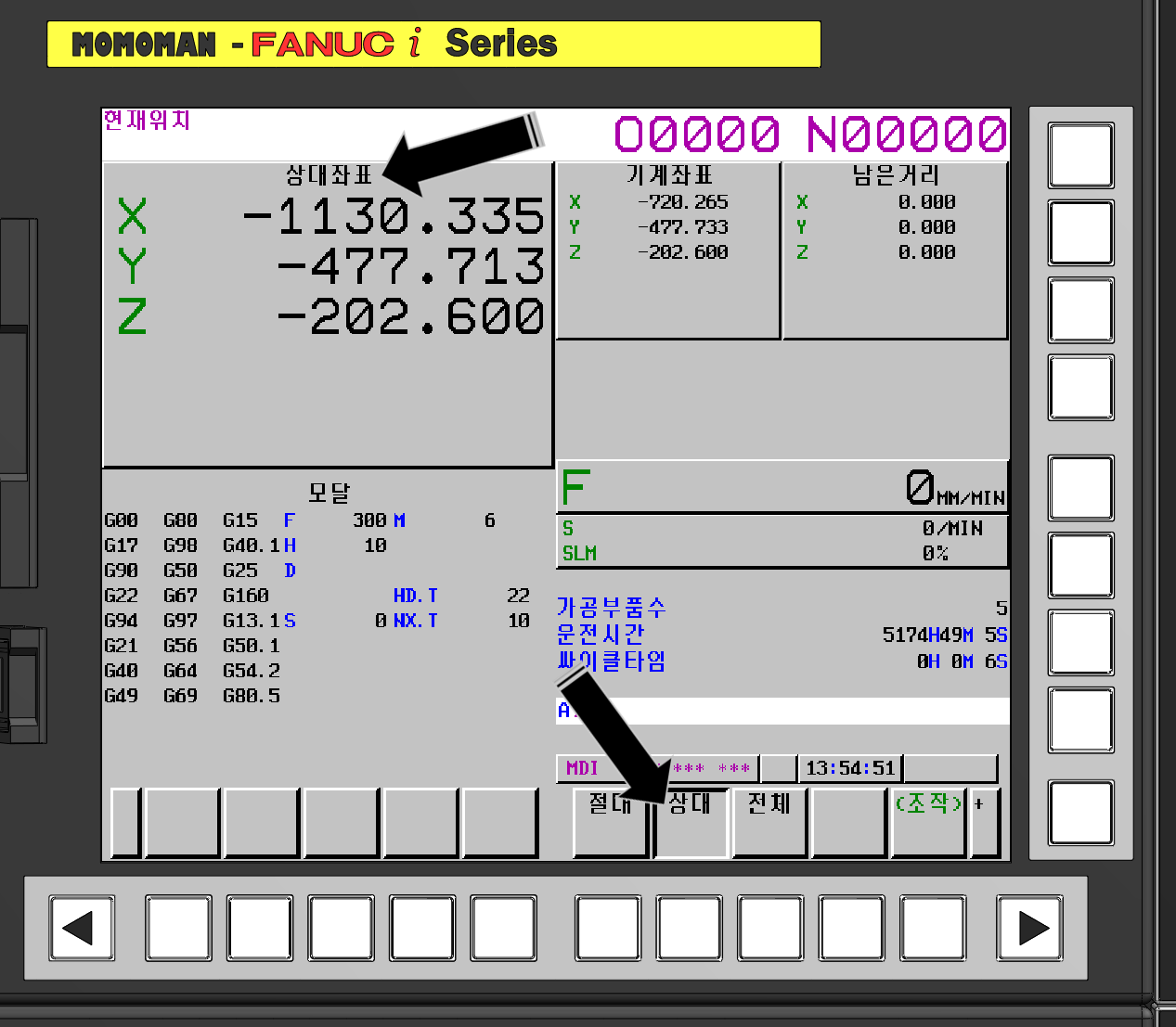
*조작반 화면형태는 화낙시스템 버전이나 각장비 상태에 따라 다소 차이가 있습니다.
그리고 조작반의 운전모드 선택 스위치에서 핸들모드로 전환합니다.

그리고 조작반에 걸려있는 MPG(펄스발생기 : 축 이송 조작반)를 들어 해당 소재 접촉면(측정면)으로 이송합니다.

*우선적으로 빠르게 해당위치로 이송하여야 하므로 축 이송량 선택 로터리 스위치를 X100(이송량 100배)를 선택하여 조작합니다.
* 잠시 여기서 두산 MPG(MANUAL PULSE GENERATIOR : 수동 펄스 발생기) 조작법에 대하여 설명하겠습니다.
1. 각부 명칭 및 작동법

① 비상정지 버턴 (EMERGENCY STOP)
- 조작반에 배치된 비상정지 버턴과 동일한 역할을 합니다.
비상 상황시 누르면 장비의 모든 작동이 정지(비활성화 : 내부적 전원차단상태)를 유지합니다.
* 만일 조작반의 비상정지 버턴을 조작하지 않았는데 비상정지 상태 알람이 발생하면 여기 MPG의 비상정지 버턴 상태를 확인하십시오.
② 축 선택 로터리 스위치 (AXIS SELECTION ROTARY SWITCH)
- MPG 조작으로 이송할 축의 선택 로터리 스위치입니다.
해당 축 방향으로 돌려서 선택하시면 됩니다. (선택된 축만 이송이 가능합니다.)
X : X축 방향으로 이송합니다.
Y : Y축 방향으로 이송 합니다.
Z : Z 축 방향으로 이송합니다.
4 : 4th부가축(A or B 축) 방향으로 이송합니다.
5 : 5th부가축(C 축) 방향으로 이송합니다.
* 4 & 5는 장비 옵션상황으로 해당 부가축 추가설치 시 작동합니다.
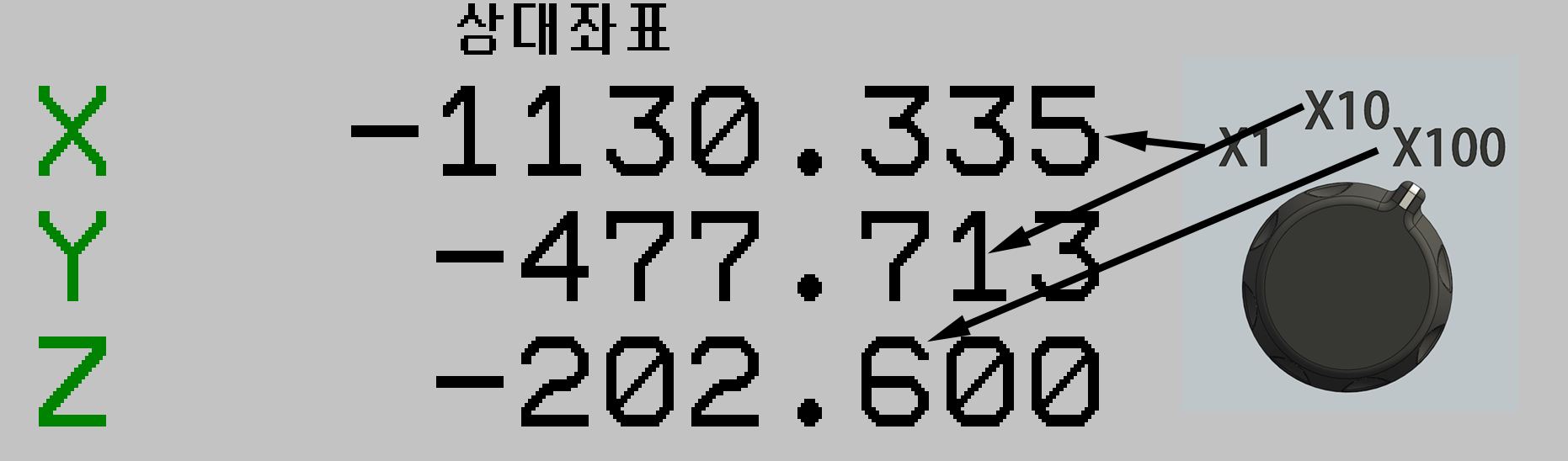
③ 이송량 선택 로터리 스위치 (FEED SELECTION ROTARY SWITCH)
- 선택된 축의 이송량을 선택하여 핸들로 펄스발생시 이송량를 조절합니다.
X100 : 기본 이송량의 100배로 이송합니다. (핸들 눈금당 0.1mm 이송량)
X10 : 기본 이송량의 10배로 이송합니다. (핸들 눈금당 0.01mm 이송량)
X1 : 기본 이송량의 1배로 이송합니다. (핸들 눈금당 0.001mm 이송량)
* 이것은 조작반 절대, 상대 좌표값의 변동량과 일치합니다.
④ 핸들(펄스발생)(HANDLE)
- 핸들 조작으로 해당 축이송량을 (+/-) 방향으로 발생합니다.
핸들 조작하는 눈금당 "③이송량 선택 로터리 스위치"의 선택한 이송량만큼 이송됩니다.
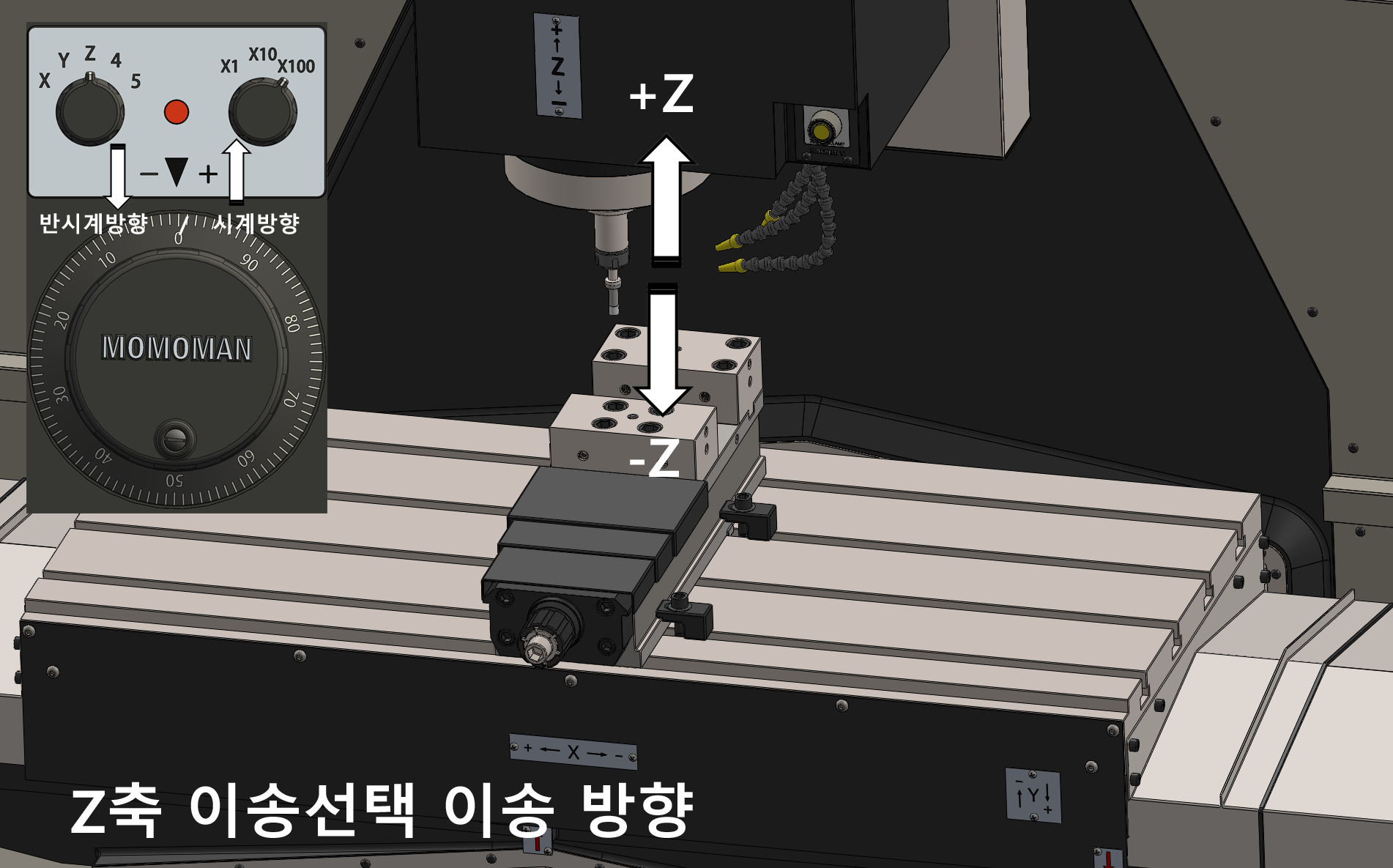
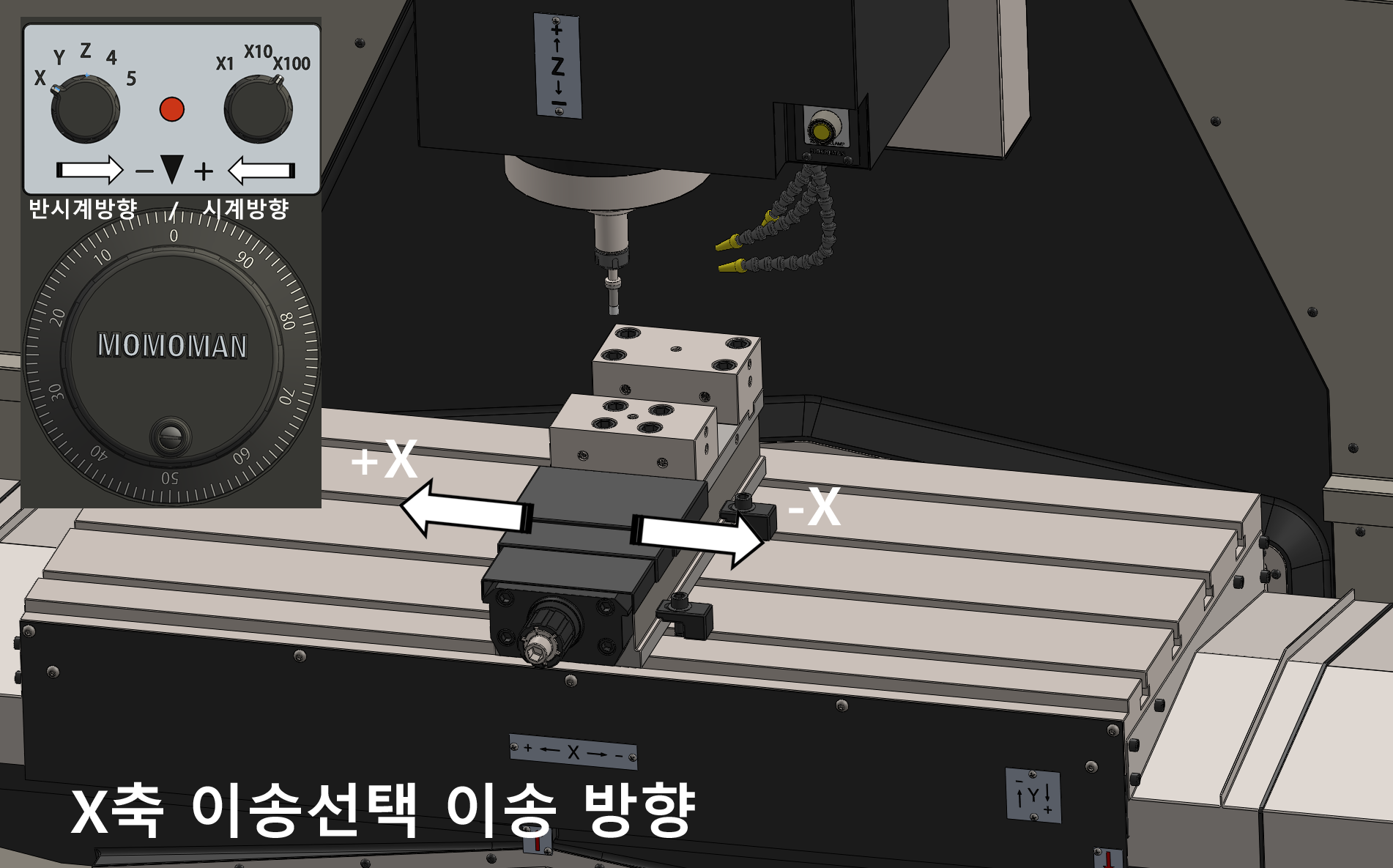
참고로 핸들 돌리는 방향(+/- : 반시계방향 / 시계방향) 은 아래를 참조해 주세요...
Z 축 이송 방향 ((-) 반시계방향:하향 / (+) 시계방향:상향)
X축 이송 방향 ((-) 반시계방향:우측 / (+) 시계방향:좌측)
Y축 이송 방향 ((-) 반시계방향:뒤쪽 / (+) 시계방향:앞쪽)
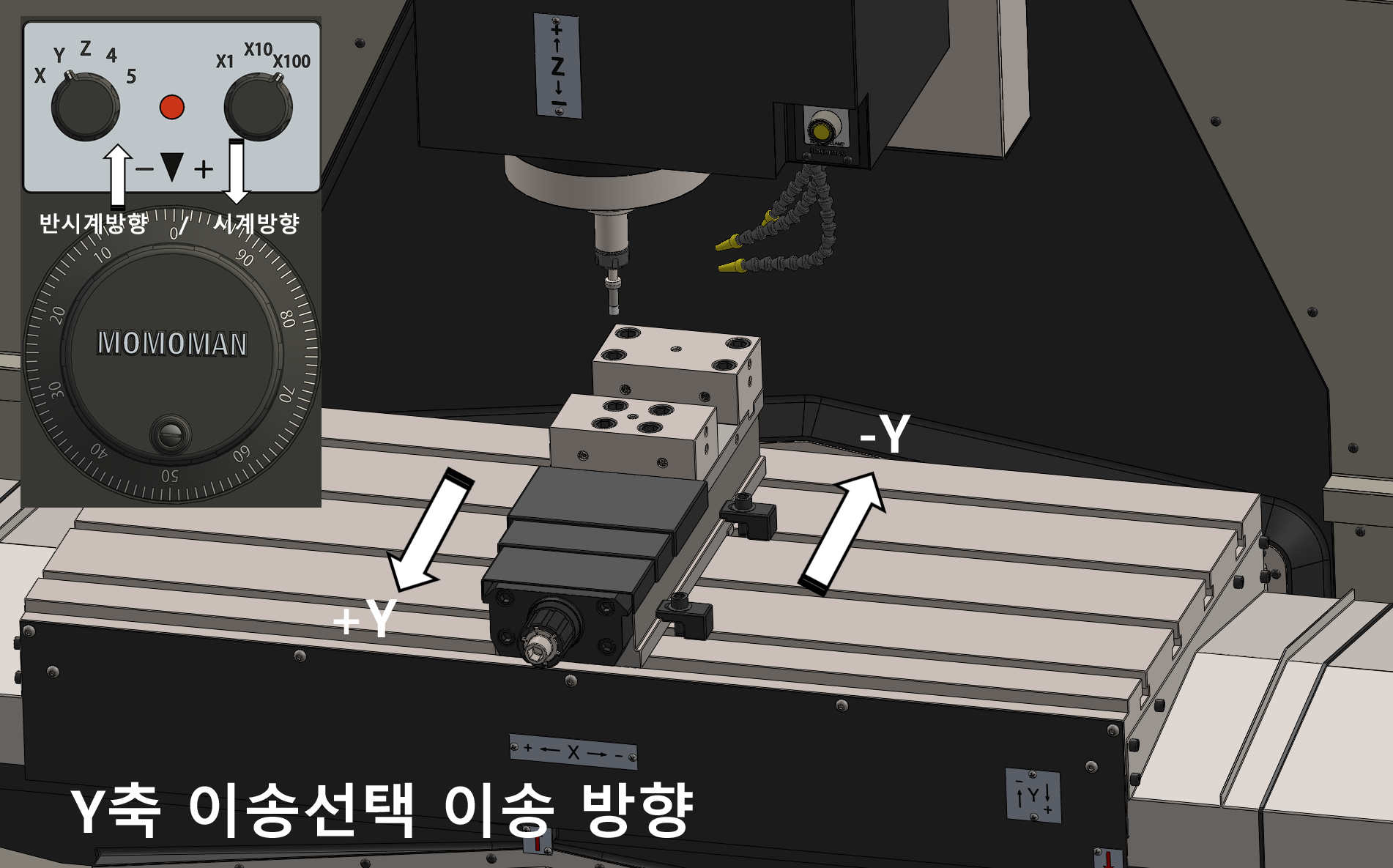
*이송 방향은 각축의 좌표값과 동일하게 증분 됩니다.
⑤ 핸들 이송모드 확인 램프 (HANDLE MODE CONFIRM LAMP)
- 현재 MPG 작동유무 상태 표시등입니다.
핸들모드에서만 점등(ON)되며 이 상태에서는 MPG의 모든 기능이 작동합니다.
핸들모드 외 다른 모드 적용 시 소등(OFF)되며 MPG의 모든 기능이 작동되지 않습니다.
* 다만 비상정지 버턴은 운전모드에 관계없이 작동합니다.
'머시닝 관련 이야기' 카테고리의 다른 글
| 머시닝 장비 사용자 G,M코드 등록 방법(아큐센터 매크로) (0) | 2023.08.31 |
|---|---|
| 머시닝 관련 초 기초사항 익히기 과정 - 07(아쿠센터 사용 방법) (0) | 2023.08.20 |
| 머시닝 센터에서 면판를 활용한 플레이트 가공 방법 -5 (웹버전) (0) | 2023.04.25 |
| 머시닝 센터에서 면판를 활용한 플레이트 가공 방법 -4 (웹버전) (0) | 2023.04.24 |
| 머시닝 센터에서 면판를 활용한 플레이트 가공 방법 -3 (웹버전) (1) | 2023.04.16 |



