


이번에는 저번에 이어서 작업평면 설정방식과 실무에 적용 시 고려사항에 대하여 설명하겠습니다.
우선 저번까지 설명에 의하면 WCS(원점 기준)평면을 선택하고 차후 각 각도별로 생성된 작업평면들을 WCS원점으로 이동한 후 2D 가공정의 경우 링크파라미터 선택을 증분값으로 하여야 한다고 했습니다.
이러한 방식에는 크게 2가지 고려점이 있습니다.
1. WCS원점의 위치
저번 설명에서는 공작물의 바닥면을 기준으로 WCS평면을 배치하고 가공정의를 생성하는것을 설명하였습니다.

그런데 문제점은 이렇게 WCS평면을 배치하면 사실상 모든 좌표값 연산이 그 WCS원점을 기준으로 회전하게 된다는 뜻이 됩니다.
* (3+2)틸팅 인덱스 기준이므로 저 WCS평면 원점을 기준으로 해당 부가축(A, B, C)이 회전되어야 각 가공경로 좌표값이 일치하게 된다는 의미입니다.
또한 한번 정해진 WCS평면원점은 고정된 좌표(해당 가공정의 내에서는) 값을 가져야 합니다.
그렇지만 실제로 해당 틸팅 인덱스 장비에서 실현해 보면 그것이 좀 문제점을 가지게 됩니다.


즉 마스터캠에서는 이러한 높이값(Z 축)을 계산해서 가공원점은 WCS평면상 원점에 두고 해당 공작물 요소를 실제 장비 체결구(예제로서는 센터링 바이스 체결위치)까지 계산하여 배치하여 작업하여야 합니다.
예제로서 아래 틸팅인덱스 C 축 회전 테이블 위에 센터링바이스를 놓고 그 바이스 체결부(이빨) 면 높이 까지를 기준이라고 할 때 그에 해당하는 위치에 공작물요소를 놓고 가공정의를 생성하면 됩니다.

* 위에서 설명한 것처럼 해당 장비 회전축 원점에 WCS평면(가공원점 평면) 원점을 위치하고 따라서 각 가공면의 적용되는 가공 대상평면도 따라서 해당 WCS평면 원점에 기준하여 원점이 정해지게 됩니다.

* 이렇게 설정 시 해당 가공원점(WCS, 워크좌표계(G54~))에서 Z축방향으로 플러스된 위치에 가공경로 좌표값이 생성되게 됩니다.
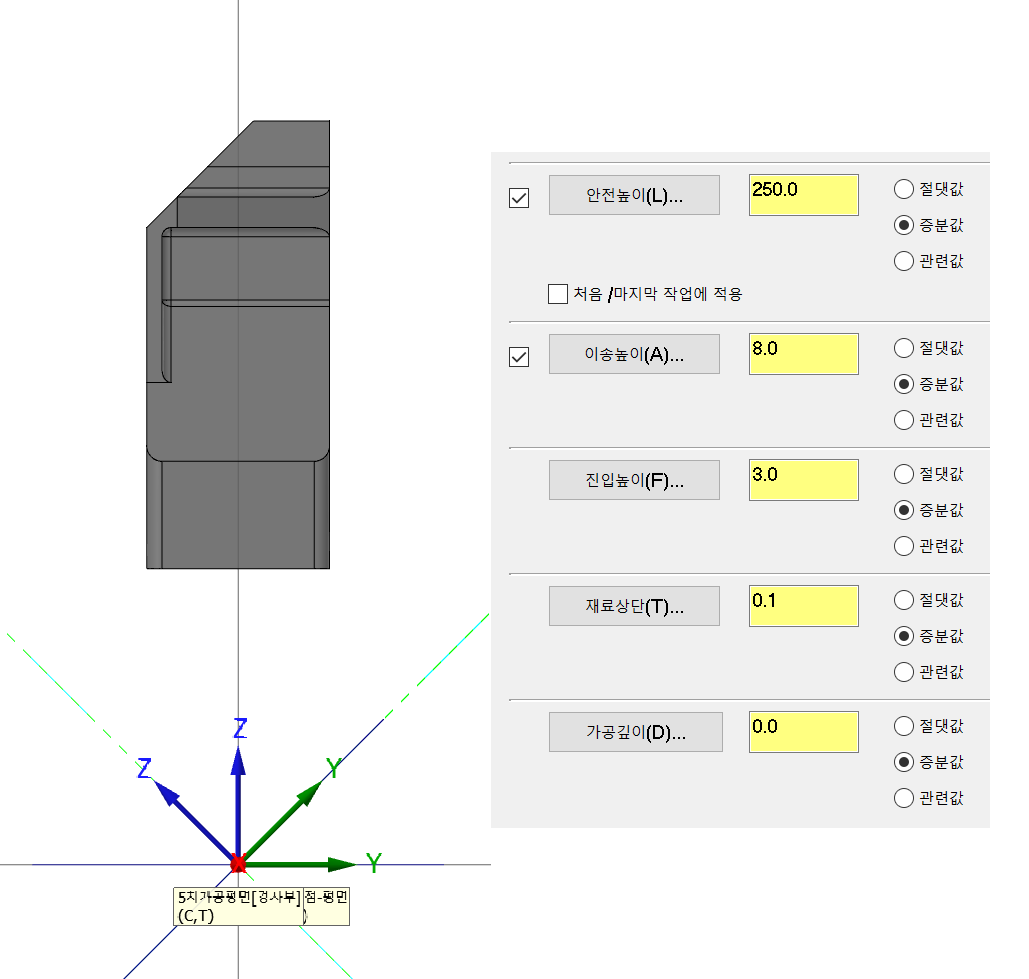
이러한 환경 속에서는 해당 2D 가공정의 절삭파라미터 설정중 평면 파라미터 항목은 아래와 같이 설정되어야 합니다.

* 위 이미지처럼 작업 좌표계 시스템(WCS평면(가공원점-평면)), 공구평면(T-plan(1차 가공평면[전면부]), 작업평면(C-plan(1차 가공평면[전면부]) 로 정의되고 각 평면원점은 X0.0, Y0.0, Z0.0으로 정의되어야 합니다.
그래서 해당 가공정의(예제)를 적절한 5축 적용 포스트를 사용하여 출력된 가공데이터(G-code)를 보면 아래와 같습니다.

① 선두 해당 공구 진입위치 X, Y축 좌표값으로 위치
② 해당 (3+2) 축의 B, C축의 값으로 회전
③ 회전축(B, C) 축 회전 후 해당 가공 대상 평면 안전높이값으로 Z 축 이동
④ 해당 가공경로 Z축 좌표값에서 절삭이송(WCS평면 원점높이 기준(G54~))

*위 이미지처럼 해당 형태로 틸팅인덱스의 회전축이 회전하며 WCS평면 원점값에 기인한 Z 축 값으로 가공경로 이송이 이루어집니다.
(다만 각각의 작업현장 상황과 장비 특성에 따라 해당 축값이나 회전방향(+/-) 값이 변동된 해당 장비에 맞게 정의하셔야 합니다.)
이것을 일반 3축 장비에서 부가적으로 2축을 추가한 형태 장비에서 적용될 수 있는 방법 중 하나입니다.
* (3+2) 틸팅인덱스 적용 머시닝 센터의 경우입니다.
2. 작업좌표계 시스템평면(WCS)과 가공 대상 작업평면(C/T-plan)의 위치 관계...
지금 까지 방식(작업평면지정)으로 하다 보니 출력된 좌표값 검증등 여러 가지 작업이 단순하게 작업이 가능했었습니다.(?)
그렇지만 일단 WCS평면(마스터캠 원점 위치)이 해당 장비와 유사하게 하단에 위치하고 해당 소재 규격측정이 약간 이상한...(해당 틸팅장비 회전축 원점이 사실상 워크좌표계(G54~) 좌표값) 상황이 되어 적응에 어려움이 생기는 경우가 있습니다.
현재까지 적용되는 작업 세팅 상황...

해당 가공정의 링크 파라미터(증분값 적용)
* 이때 가공정의 선택 체인 도형요소는 가공높이(Z축값)를 가지고 있어야 합니다.
* 이것은 사실상 모델링 기반이 아니면 어렵다는 문제가 있습니다.

위와 같이 해야 하는 단점(?)이 있습니다.
* 여기서 단점이란 2D 가공정의에 익숙한 작업자는 좀 혼란의 여지가 있다는 의미입니다.
그렇지만 잠시 생각을 하게 되면.....
가공대상 평면의 위치는 굳히..... WCS평면 원점에 일치하여야 할 필요가 없어집니다.
* 즉 WCS평면과 가공대상 작업평면은 서로 대비는 각도만(평면과 평면끼리 차이나는 평면 간 각도) 됩니다.

즉 위와 같이 WCS평면과 가공 대상평면(작업평면:C/T-plan)과 의 관계는 평면간 각도값만 적용됩니다.
* 즉 틸팅인덱스 회전축값에 영향을 주는 것은 해당 WCS평면과 가공 대상평면 간 각도값만 적용됩니다.

이렇게 사실상 각 평면 간 각도값만 적용되고 평면의 원점 위치에 따른 높이값은 사실 적용되지 않습니다.
* 이러한 틸팅 인덱스의 각도분할값 적용 시 반영되는 점이 틀리다는 설명이고 실제로 가공정의 평면파라미터값의 설정에 따라갑니다.
(이점 유의 하셔야 합니다. 해당 가공정의 평면 파라미터값(각 평면 적용과 원점값)에 따라 적용여부가 적용됩니다.)
이러한 평면파라미터의 원점 높이등은 다음과 같은 방식으로 설정(측정)됩니다.
일반적으로 WCS평면 원점과 가공 대상평면의 원점이 일치하는 경우는 당연히 각 평면과 원점 좌표값은 X0.0, Y0.0, Z0.0이 됩니다.

*사실상 이러한 것이 기본적인 평면 간 원점 적용에 대한 이해를 돕기 위하여 설명하는 과정입니다.
그렇지만 가공 대상평면이 해당 가공면(솔리드면)에 접해 있는 경우 해당 가공 대상평면(작업평면)의 원점은 다음과 같은 원리로 산출됩니다.
Z축값의 경우
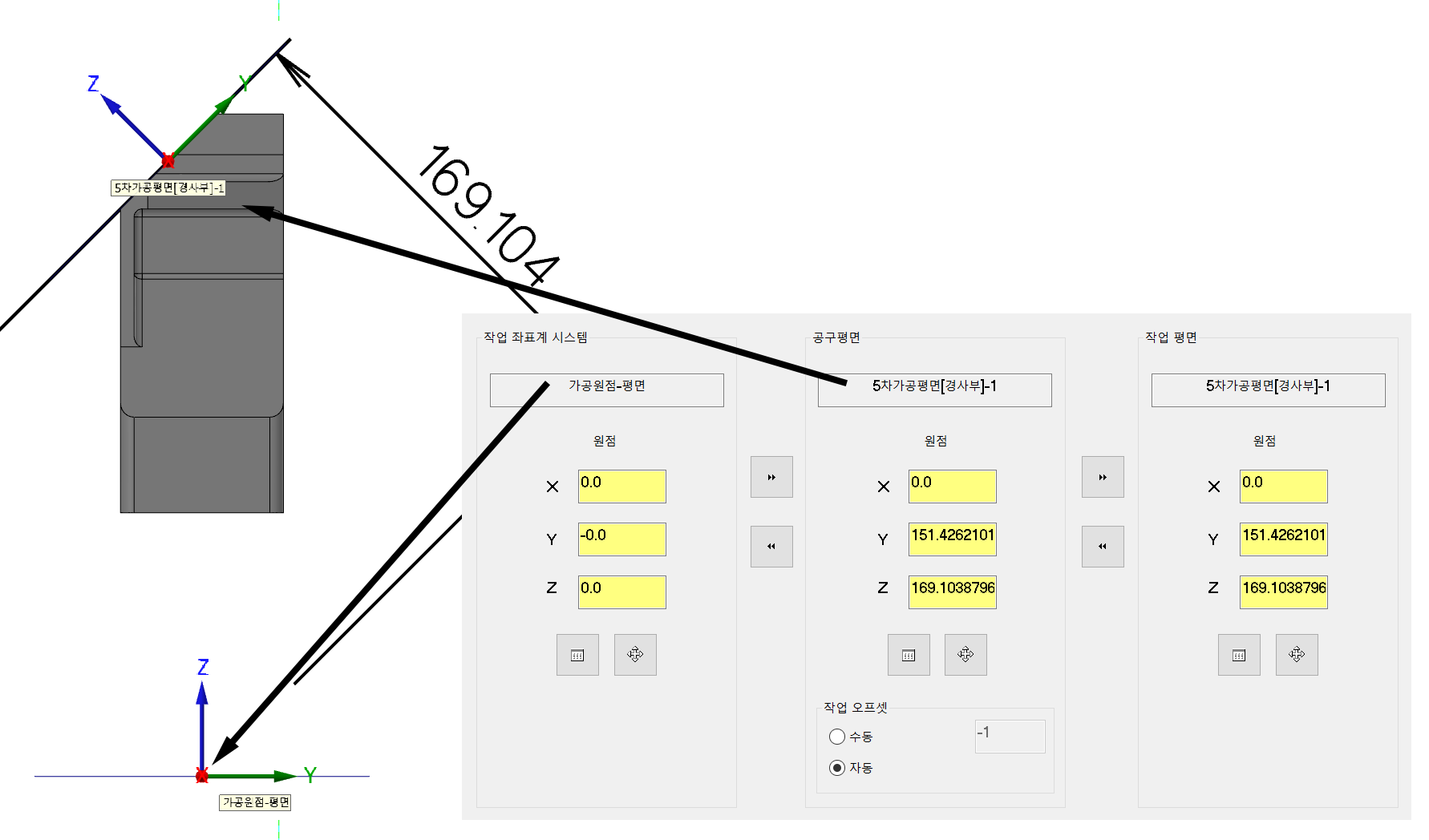
* 즉 WCS평면의 원점과 가공 대상평면 원점 간의 거리값을 측정되어 적용되는 것입니다.
다만(중요) WCS평면의 원점 Z 축 수직면 기준이 아닌 가공 대상평면 Z축 수직기준 거리값입니다.
즉 해당 가공 대상평면이 수평(틸팅 인덱스 회전이 회전한 후)이 된 상태에서 WCS평면 원점과 가공 대상평면원점 간의 거리값입니다.
X, Y축값의 경우
* X축은 현재 원점 간 정렬이 되어 있어 X0.0으로 정의됩니다.

* Y축원점 좌표값도 해당 가공 대상평면이 수평(회전) 한 후 WCS평면 원점과 가공 대상평면 원점 간 Y축 거리값이 산출되어 적용되는 것입니다.
그러면.. 이렇게 볼 수 있습니다.

위 이미지처럼 해당 가공 대상평면이 WCS평면원점에 있거나 해당 공작물(솔리드) 가공 대상면(곡면)에 가공 대상평면이 위치하여도 무방하다는 애기가 됩니다.
* 다만 2D 윤곽 가공정의 경우 링크파라미터의 체인 선택요소에 따라 절댓값 적용이냐 증분값 적용이냐는 구분 하셔야 합니다.
* 또는 링크파라미터가 없는 3D 가공정의 경우에는 어느 쪽이던 무방하다는 애기가 됩니다.
2D 가공정의 링크파라미터 절댓값 적용 가능 작업평면

2D 가공정의 링크 파라미터 증분값 적용 가능 작업평면
그러면 작업자의 선택에 따라 작업평면 형태를 적용하시면 됩니다.
그런데 여기서 또 잠시 생각을 합니다.
만일 틸팅 인덱스(3+2) 장비에서 센터링 바이스를 소제 체결구로 하여 작업 시 사실상 해당 장비 워크좌표계(G54~)는 틸팅인덱스 회전축 중심위치에 소재가 항상 위치한다는 전제하에 작업이 진행됩니다.

* 위와 같이 워크좌표계(G54~)의 원점 위치가 해당 틸팅 인덱스 회전축 중심에 존재하여야 하며(이는 4축 인덱스 적용 시 부가축(회전축) 중심에 원점이 위치한 것과 일치합니다.) 이것은 이러한 위치를 워크좌표계 원점으로 설정 시 이후 소재 위치는 별도의 측정(아큐센터 측정) 작업이 필요 없다는 뜻이 됩니다.
* 이것은 항상 소재가 회전축 중심점(소재중심점)에 위치한다는 전제하에 가공경로 좌표값이 산출됩니다.
그렇지만 이렇게 작업하면 왠지 가공 시마다 정해진 위치에 소재를 체결하면 되는구나 생각되며 작업의 편의성을 추구할 수 있지만, 다른 면에서 보면 해당 소재의 위치값이 변동(틸딩 인덱스 회전축 원점위치가 아닌)되게 체결하여 항시 소재의 규격(위치)을 측정하여 가공하여야 하는 경우에는 좀 어려운 점이 발생합니다.
* 과거 양산이거나 일반적인 3축 장비에 부가축을 올려서 작업 시 고정적인 좌표값으로 산출하여 작업하는 경우에는 차라리 이러한 방식(소재위치(체결구 위치))가 수월할 수도 있습니다.
그러면 이러한 작업평면계의 원칙을 지켜나가면서 해당 가공 소재의 위치를 변동(작업 시 소재위치를 아큐센터(에지 파인더)로 측정하고자 하는 경우) 하고자 한다면 워크좌표계 설정방법을 고려할 필요가 있습니다.
우선 해당 장비(3축 장비 테이블 위 부가 2축 틸팅인덱스설치)의 부가축 회전중심축 원점 위치를 기계좌표값으로 측정합니다.

* 우선 임시적으로 해당 회전축 원점 기계좌표값을 측정 후 이 좌표값을 별도 메모지나 다른 인식하기 좋은 위치에 표기합니다.

그리고 소재를 체결구 위치에 체결하고 소재를 해당 측정기구(아큐센터등)로 소재중심점(양센터 측정)의 기계죄표값을 구합니다.
* 이때 소재 Z 축 측정면은 해당 가공정의 작업평면 높이값(마스터캠의 공작물 위치값에 일치하는)에 따라 선택가능합니다.
(즉 소재 상면 높이값(가공여유 고려한) 또는 체결구(센터링 바이스 바닥 또는 체결 이빨부의 고정된 위치값)의 높이값을 선택가능 하다는 의미가 됩니다.)
(항상 말씀드리지만 마스터캠 가공정의 생성 시 항상 해당 장비의 소재 체결원점 좌표값을 고려하셔야 합니다.)
* 보통의 경우는 체결구(바이스)에 별도의 스톱버를 설치하여 일정한 범위 내에 소재가 위치할 수 있도록 조절하므로 이러한 점을 고려하고 작업하셔야 합니다.
그리고 앞서 해당 틸팅인덱스 장비 회전축 원점 기계좌표값과 지금 측정한 소재 중심점 좌표값과 비교하여 실제 가동 시 두 원점을 일치시키 위하여 해당 장비의 워크좌표계의 EXT 좌표계에 대비는 되는 좌표값(두 원점을 일치하기 위한 오프셋값)을 입력하여야 합니다.

* 이러한 원점 설정 방식은 우선 하나의 세팅법 예제로서 봐주길 바라면 실제 적용 시는 해당 작업자 장비현황과 가공 공작물의 형태에 따라 선택하셔야 합니다.
그리고 마스터캠 가공정의 설정 시 마스터캠 원점 위치(WCS 평면원점)에 해당 장비 회전축 원점이 위치한다고 생각하고 사전에 미리 실 장비에서 실측한 틸팅인덱스 원점에서 실측한 체결구 소재 고정위치값을 유지하면서 해당 공작물을 위치하고 가공정의를 생성하여야 합니다.
* 이것은 가공 정밀도와 밀접한 관계가 있으므로 해당 가동 방식에 따른 이해가 필수적으로 필요하며 왜 이렇게 해야 하는지를 잘 검토하셔야 합니다.

그리고 해당 마스터캠 가공정의 작업평면은 다음과 같이 이루어지며 이러한 경우 해당 가공정의 링크파라미터 선택요소는 절댓값으로 지정 가능합니다.

그런데 이렇게 3축 머시닝센터(다축 제어옵션이 없는)와 부가 2축 틸팅인덱스를 기준으로 볼 때 단순한(?) 각도분할식 2D 가공정의만 가능하고 동시제어가 불가능에 가깝습니다.
* 이것은 해당 틸팅인덱스 자체 성능문제인 것도 있습니다.
(정밀도 유지가 안 되는.....)
거기다가 위에 설명한 것처럼 소재 규격 설정(아큐센터 측정)에 있어서도 여러 가지 제한조건이 있어 불편하게 느낄 수 있습니다.
* 이것은 화낙 버전에도 제한이 있습니다.
그래서 좀 더 알아보면 처음부터 해당 장비 선택을 이러한 오축(동시제어)가공 기능이 있는 장비(화낙버전 선택)을 구매 또는 업그레이드(?) 하면 뭔가 좀더 편리하게 작업을 진행 가능합니다.


* 즉 해당 머시닝센터 장비의 화낙버전이 fanuc 30i, 31i정도의 버전이 되어야 공구선점제어(TCPC : Tool center point control), 부드러운 공구제어 그리고 다각도평면 분할지원(G68.2 : plane spatial)이 되어 수월하게 5축 동시제어 가공이 가능해집니다.
그래서 다음 설명에서는 다각도공간 평면분할(G68.2)에 대하여 알아보겠습니다.
'마스터캠 2021 기능 교육 자료(초안) > 다축 가공 경로 관련' 카테고리의 다른 글
| 마스터캠 2021를 활용한 틸팅인덱스(3+2) 작업평면 적용방법-2 (1) | 2025.03.23 |
|---|---|
| 마스터캠 2021를 활용한 틸팅인덱스(3+2) 작업평면 적용방법-1 (1) | 2025.03.16 |