

이번에는 수동모드 (JOG or HANDLE)에서 두 기능을 같이 쓸 수 있는 방법을 알아보겠습니다.
역시 같은 맨트로 신규장비 을 들려서 작업 중 축 이송을 위하여 핸들 모드로 전환 후 MPG을 사용하여 축 이송을 하던 중 다시 다른 지점으로 (멀리 있는) 이송하려면 조그 모드로 전환하여 해당 축 조그 이송 버턴을 눌러 이송을 한 후 다시 핸들 모드로 전환하여 MPG을 사용하여 다시 자세한 축 이송을 하여야 합니다.
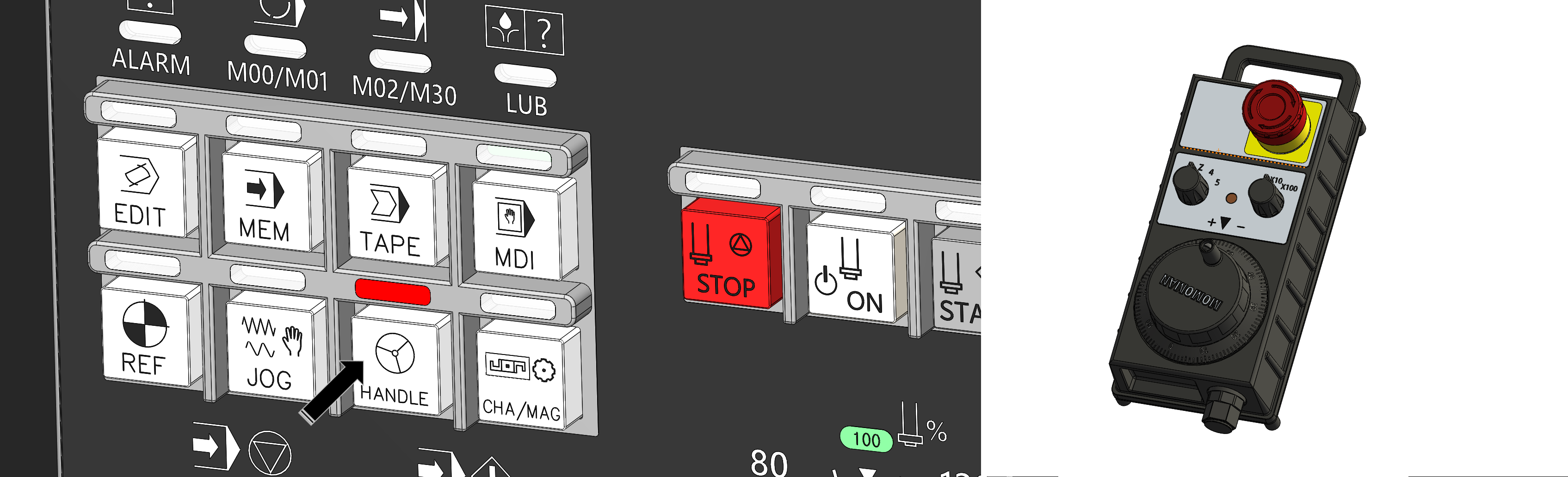
즉 아래와 같이 조그모드(JOG) 에서 해당 축 조그 이송 버턴을 라피드 버턴과 같이 눌러 이동하거나 아니면 핸들 모드로 놓고 MPG(펄스 발생기)로 해당 축 선택 후 다이얼을 해당 방향으로 돌려 이송하여야 합니다.

그러다보니 작은 공간 이송은 뭐 큰 문제 가 없으나 배드 좌우 을 왔다 갔다 할 때 조금 지체되는 문제가 있습니다.
그래서 조그 모드 와 핸들 모드 을 왔다 갔다 하며 조작을 하여야 합니다.
이러한 불편(?) 을 해소하기 위하여 조그 모드에서 핸들 기능(MPG) 사용이 별도 전환 없이 사용하게 하는 파라미터 을 알 아봅니다.
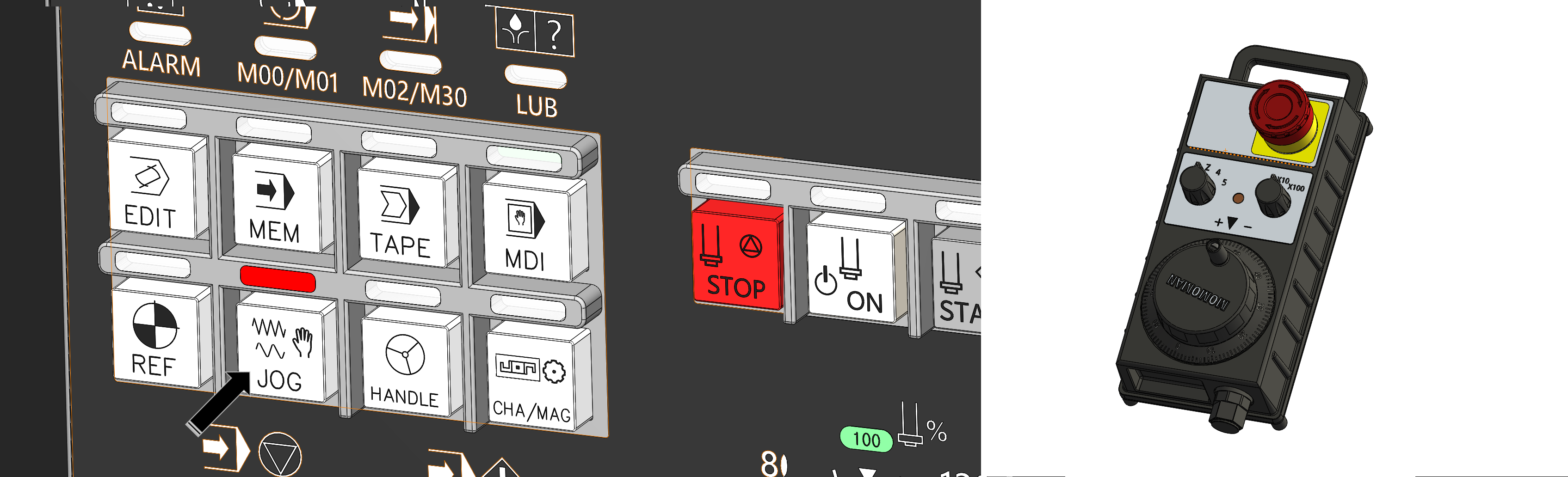
해당 파라미터 번호는 7100번 #0JHD 입니다.
위 파라미터 매뉴얼처럼 7100번 #0 JHD 값을 "0"으로 하면 조그 모드(JOG)에서 핸들 기능 (MPG)가 사용 불가합니다.
만일 "1"로 입력 시 조그 모드에서 핸들 기능 (MPG)을 사용 가능합니다.
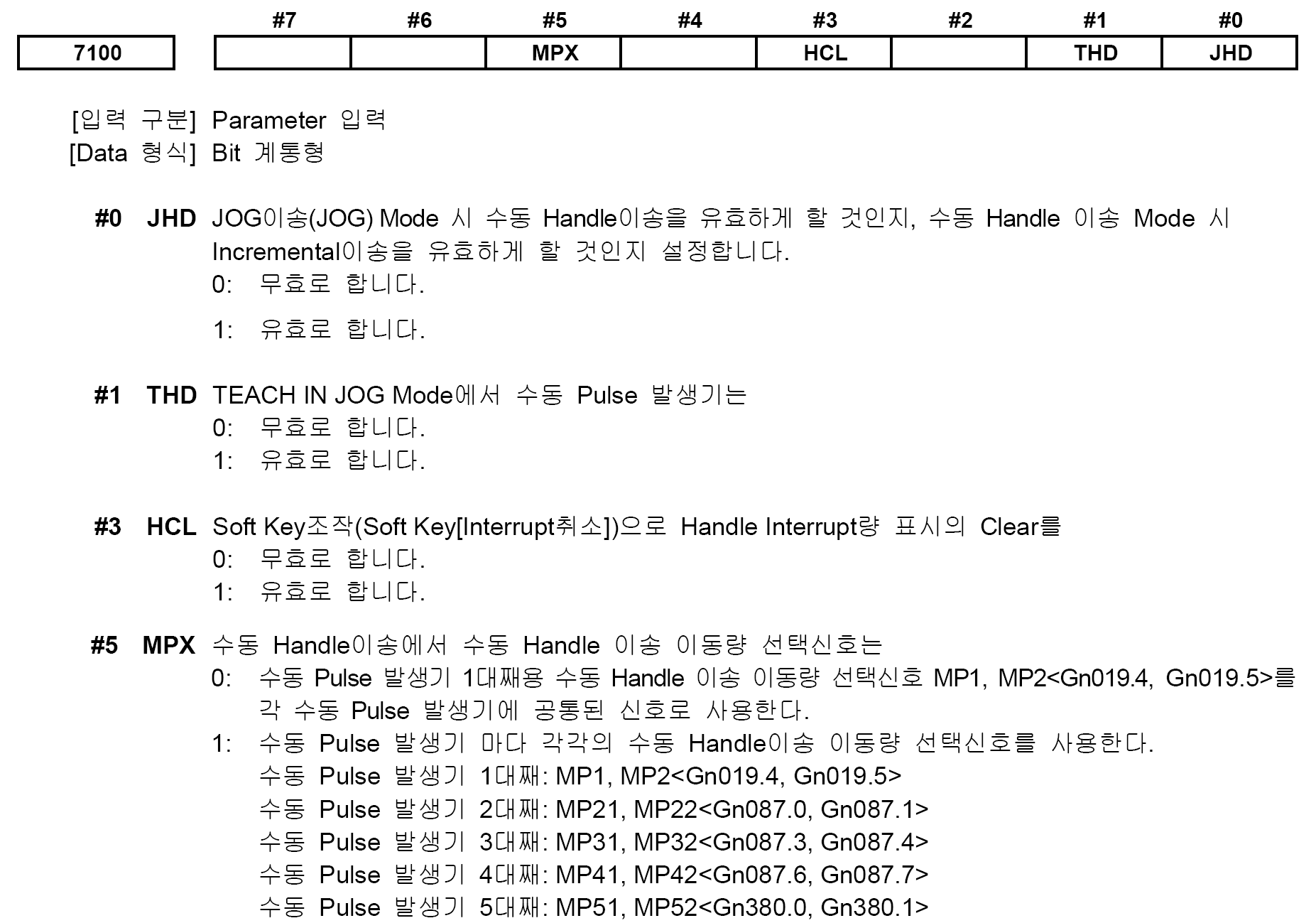
위 이미지처럼 JOG 모드 상태(점등)에서 MPG 가 작동 가능합니다. (별도의 조작 없이 동시 사용이 가능합니다.)
* 다만 반대로 핸들 모드(HANDLE)에서 조그 기능을 사용하게 하는 경우는 없습니다. (사실 필요가 없어서)
* 그리고 주의 사항으로 이렇게 파라미터 수정을 하게 되면 전체 원점복귀 버턴이 작동하지 않습니다.
개별 축 원점복귀는 작동 하나 전체 원터치(?) 원점복귀 기능 은 작동하지 않으므로 사용 상 주의 하시기 바랍니다.

위 전체 원점복귀 기능 이 작동 하지 않습니다.
그리고 수동모드 (JOG & HANDLE)에서 축 이송 시 오버 트레블 (가동범위)을 넘어가면 자동 알람이 발생하면서 이송이 중지되고 리세트 키(RESET)를 눌러 알람을 해체하고 다시 축 을 수동 이송(반대방향, 이송 범위 내) 하여 작업 이 가능하게 되어 있습니다.
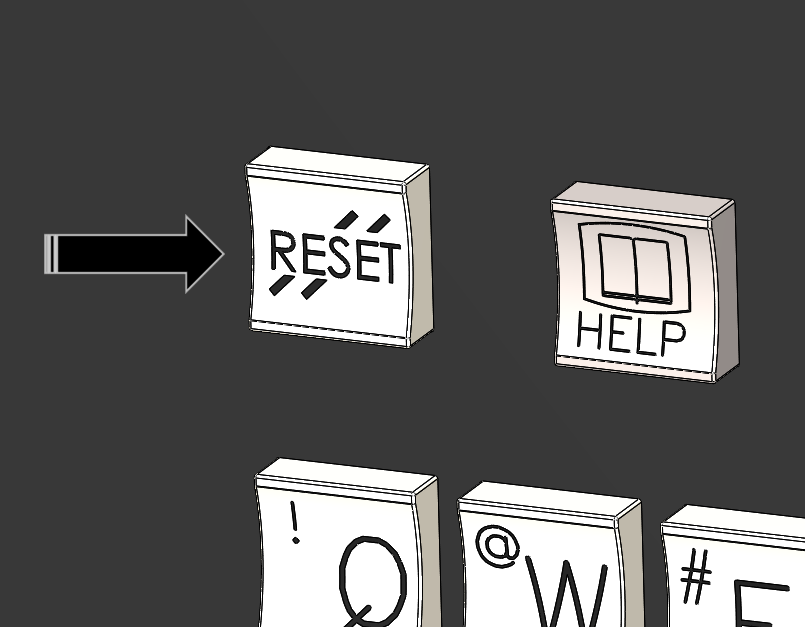
이러한 리셋 키 누르는 과정 (알람 해체) 이 귀찮다고 느끼시는 분이 계십니다.
그래서 만일 축 이송 중 오버 트레블 이 발생하여도 바로 별도 조작 없이 반대방향(축 이송 범위 내)으로 복귀하면 별도 알람 해제 조치 없이 바로 다음 작업을 이어 갈 수 있도록 하는 것 을 원하시는 분이 계십니다.
역시 장비 매뉴얼을 보면 해당 파라미터는 1301번 #4 OF1입니다.

그러므로 위 내용처럼 1301번 #4 OF1의 입력 값이 "0" 일 경우 오버 트레블 발생시 알람 해체 을 위한 리셋키(RESET) 을 눌러야 알람 해체가 되며 "1" 로 입력 시 오버트레블 이 발생 하면 (동일하게 알람은 발생 합니다) 바로 축이송 을 하여 오버트레블 상태 을 벗어나면 바로 알람 해체가 됩니다.
* 단 위 내용과 같이 파라미터 1300 #7의 값이 "0" 이어야 합니다.
* 이러한 조치 을 한다 해도 오버 트레블 발생하면 알람 발생과 장비 상부의 삼색 상태 등 은 적색으로 점등됩니다.
물론 오버 트레블 해체가 되면 삼색 상태 등 은 점멸하고 알람은 히스토리 내용만 남습니다.