


안녕하십니까?
마스터캠 X8부터 적용되는 머신 시물레이션 은 말 그대로 머시닝 (가공 장비) 자체 을 기초로 가공 경로 을 시물레이션 하는 과정입니다.
즉 모의 가공 + 가공 적용되는 장비 (머시닝)을 합쳐서 보여 주는 것으로 주목적 은 실 가공 시 공구 , 소재 , 고정구(바이스 등) 장비 구성 요소와 의 충돌 여부 을 확인하는 과정입니다.
주로 부가축 이후부터 많이 적용하는 가공 여건 (가공 경로 외)을 확인하는 목적으로 사용됩니다.
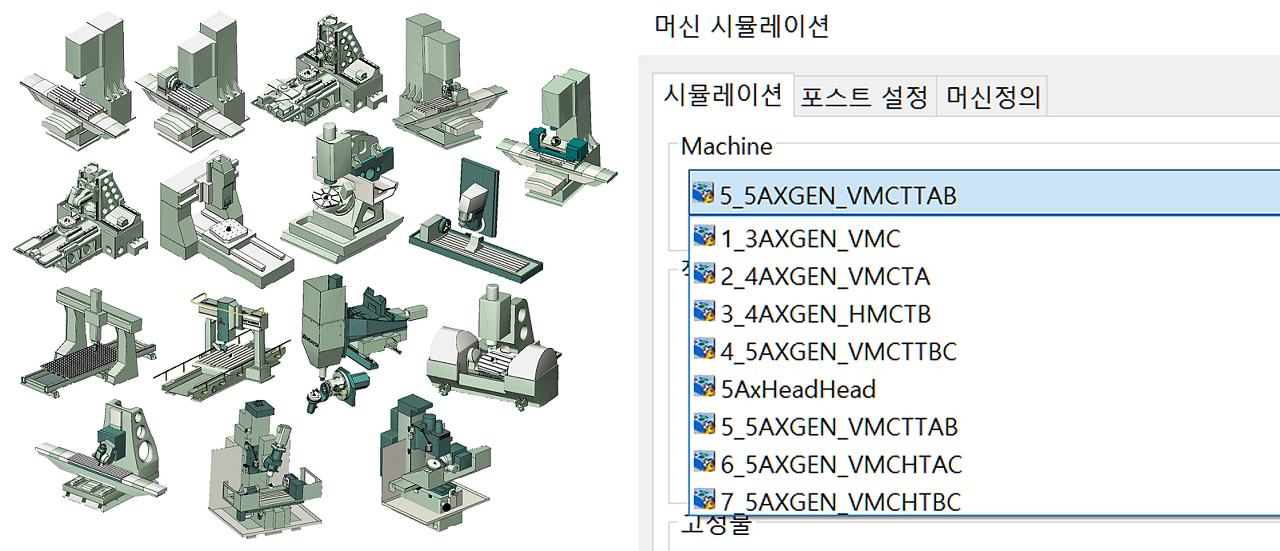
마캠 자체에서 자체적으로 여러 가지 머시닝 장비 샘플을 제공 하지만 보통 저희 가 사용하는 장비는 적용되지 않아 교육 목적 이상으로 적용하기 어려워 실 가공 시 충돌 여부 나 접촉 여부 을 확인하기 어렵습니다.
그래서 별도로 자체 머시닝 구현 모델링을 활용한 머신 시물레이션 모델을 제공합니다.
다만 그 방식 이 통상 사용자 가 쓰고 싶으면 활용하라고 했다기보다는 숙련 사용자 가 알어서 활용하는 요건만 갖추어져서 접근 이 어렵다는 문제 가 있습니다.
다만 일단 한번 머신 시물레이션 시스템을 완료하면 그다음부터 는 거의 자동적으로 적용 이 가능하므로 교육용 또는 부가축 장비 나 호리젠탈 장비 에는 적용 하면 다음 가공 시 충돌이나 가공 공정에 대한 설명 이 쉽다는 장점 이 있습니다.
그럼 머신 시물레이션 생성을 위한 준비 작업을 하겠습니다.
준비물
1. 해당 머시닝 모델링 (가능한 실제 장비의 형태와 규격 이 일치하는...)
이 모델링 은 어떠한 파일 (생성 프로그램) 은 상관없으나 최종 저장 파일 확장자는 STL입니다.
2. 해당 장비 제원 (가동 범위 , 특성 등)
해당 모델링 구성 시 실제 움직이는 거리 등 을 입력해주어야 하므로 미리 확인하셔야 합니다.
3. 같은 이유로 가공 원점 (공구 기준점) 설정 (마캠 원점 이 나 장비 기계 원점과 틀립니다.)
머신 시물레이션으로 전환된 모델링 이 어떻게 움직 일지 미리 생각해서 결정합니다.
* 위 사항 은 임의적으로 사용자 가 설정하는 것이므로 거의 모든 설정을 입력하기 때문에 발생합니다.
1. 모델링
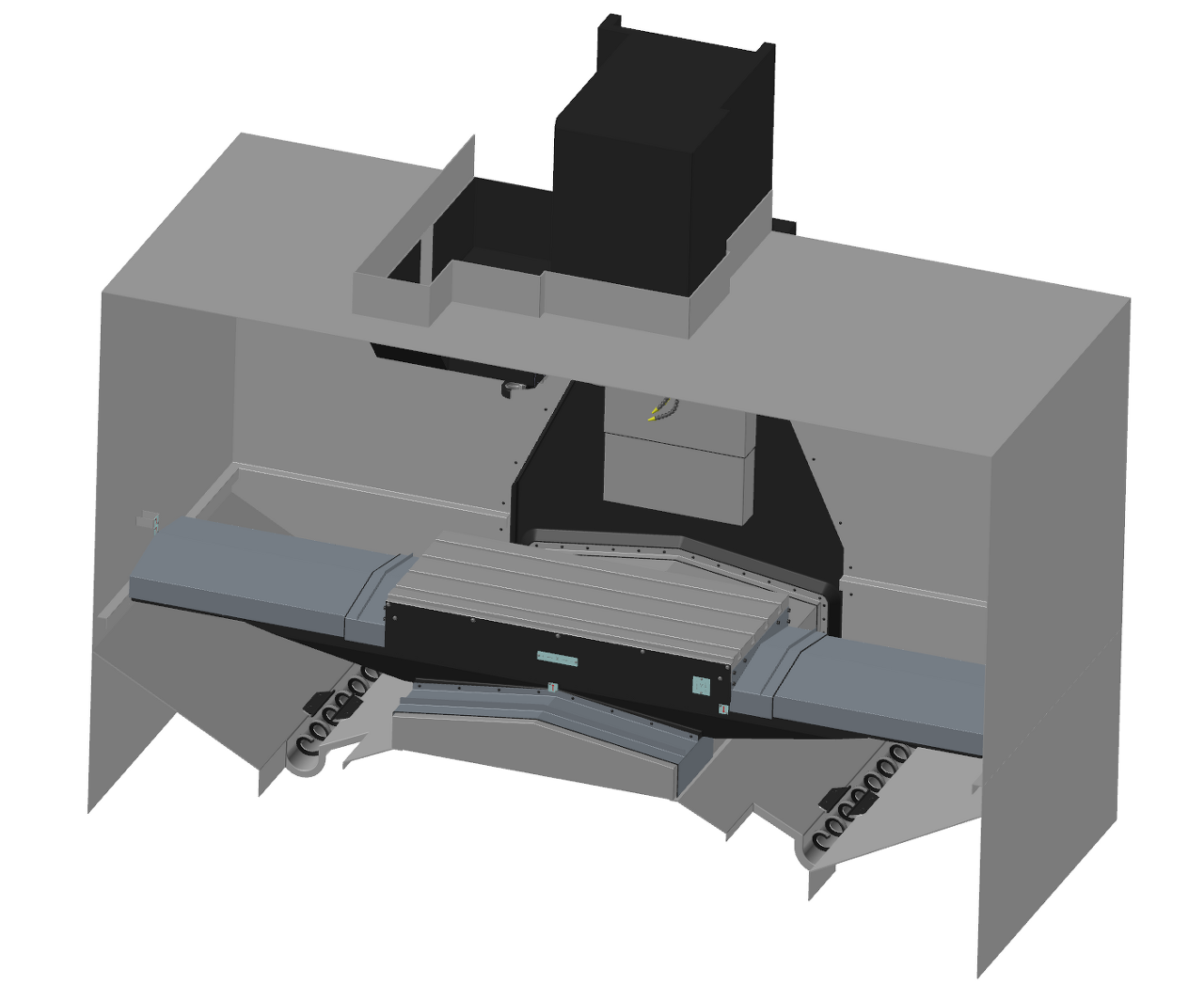
우선 해당 장비 모델링을 모델링 전문 프로그램을 통해서 합니다.
이것을 잘 정리하여 (각 이송되는 부분 별로 분리) 마스터캠으로 변환합니다.
(이번 경우 파라솔리드 확장자(*. X_T)로 했습니다.
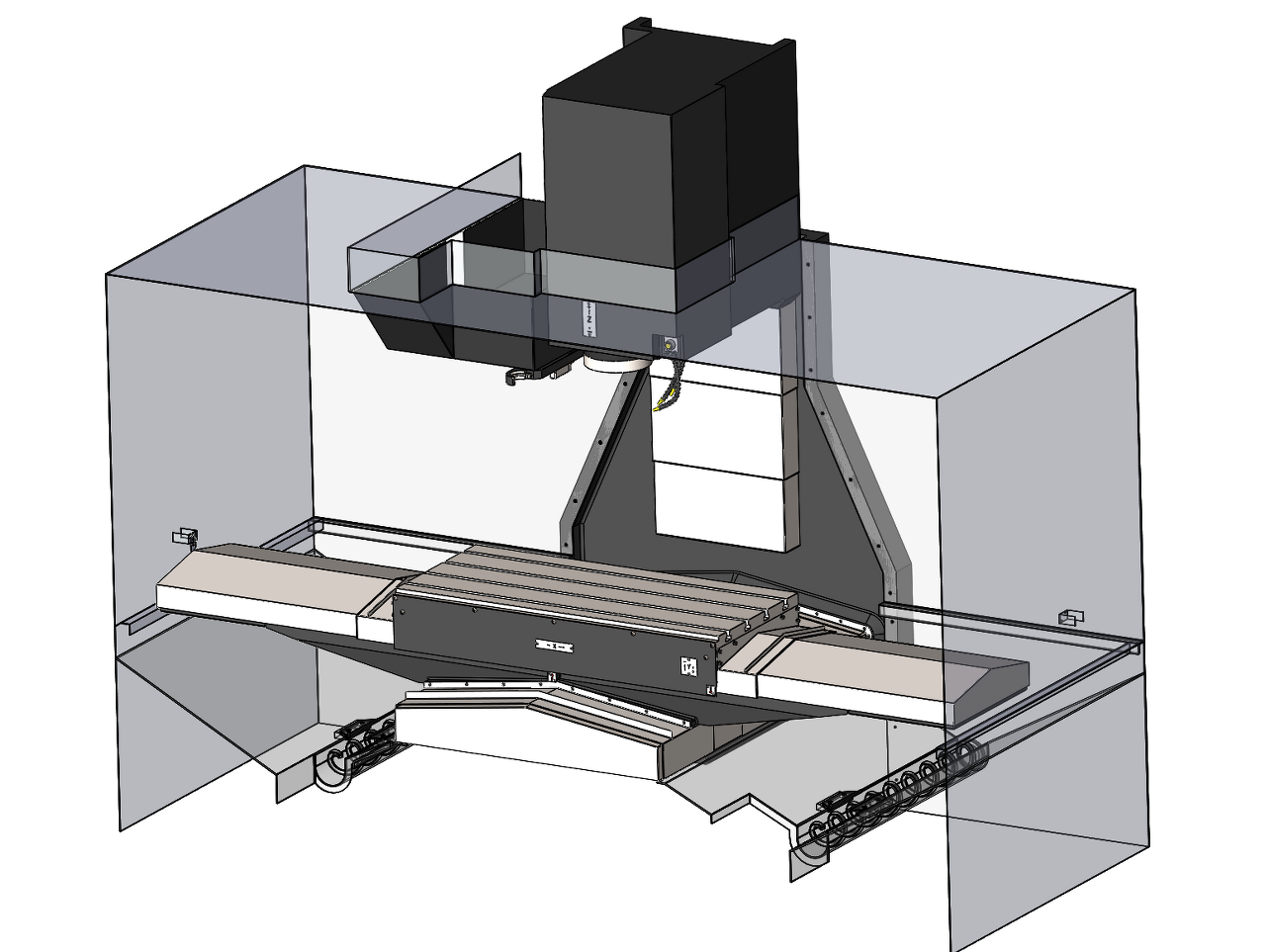
마스터캠에서 불러 드린 후 각 부분 레벨로 분리 (특별한 의미는 없고 구분이 편하도록) 합니다.
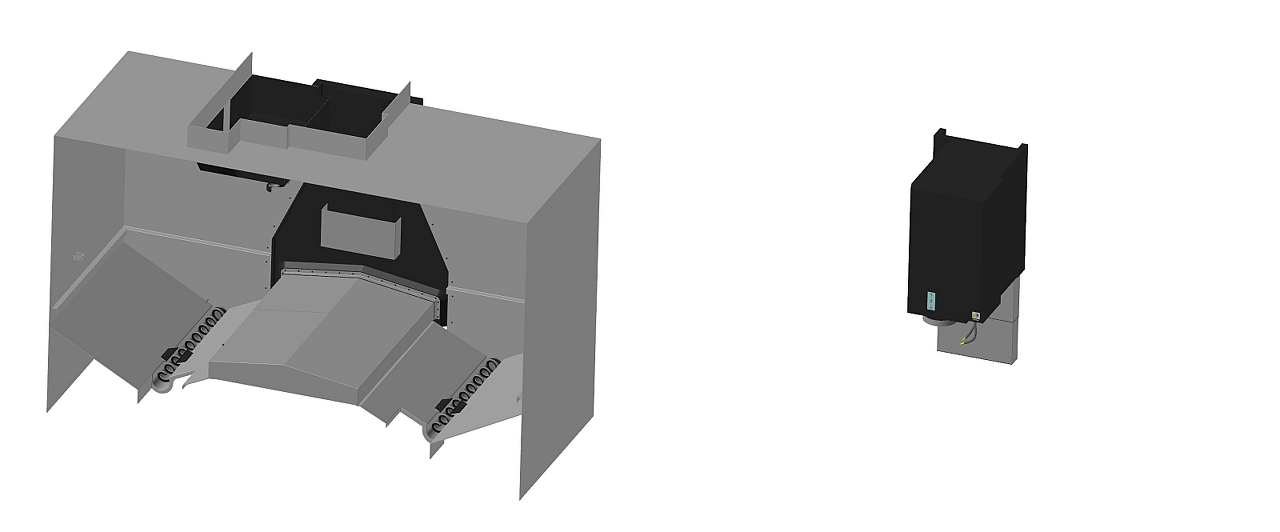
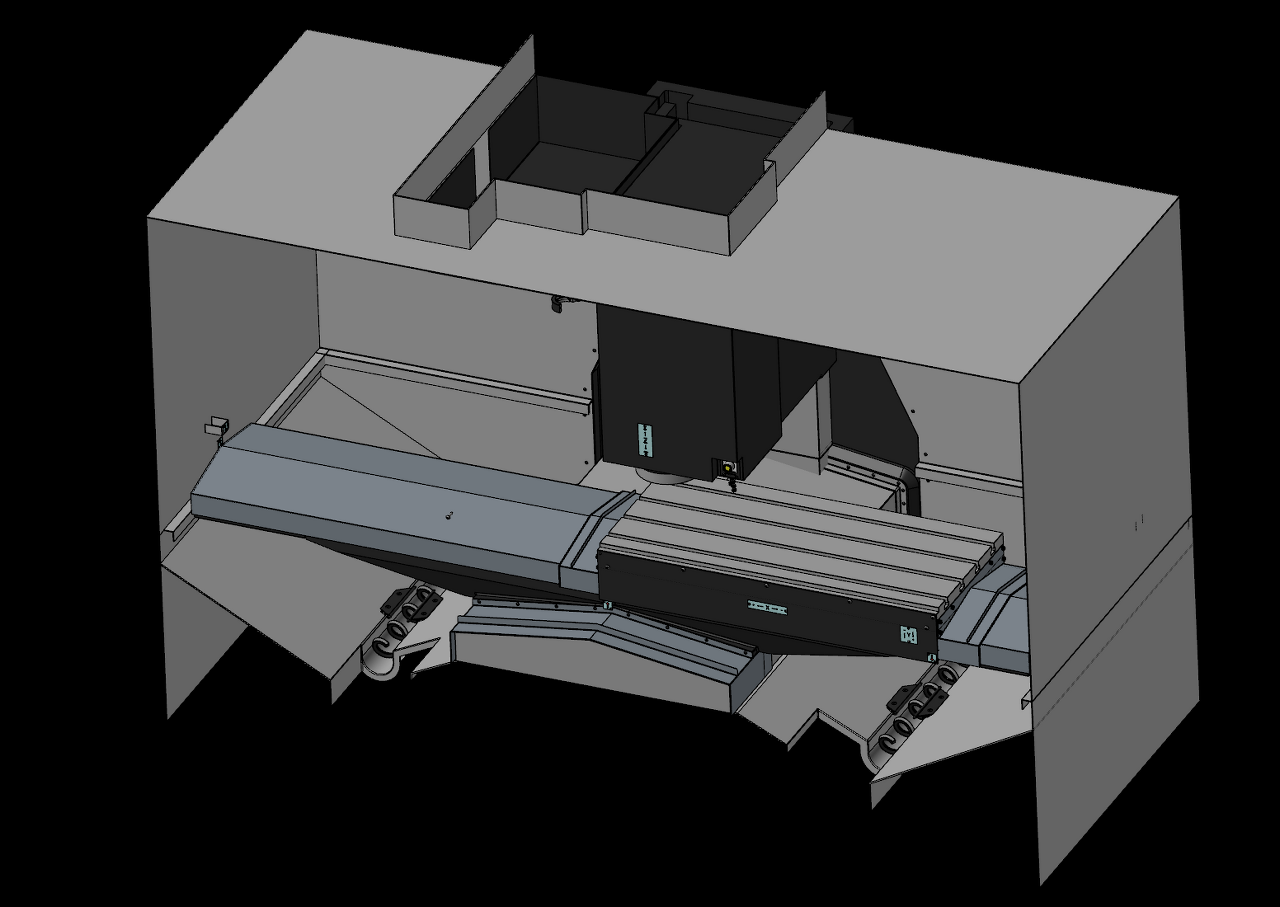
좌측 : 머시닝 하우징(가동하지 않는 외부) , 우측 : 스핀들
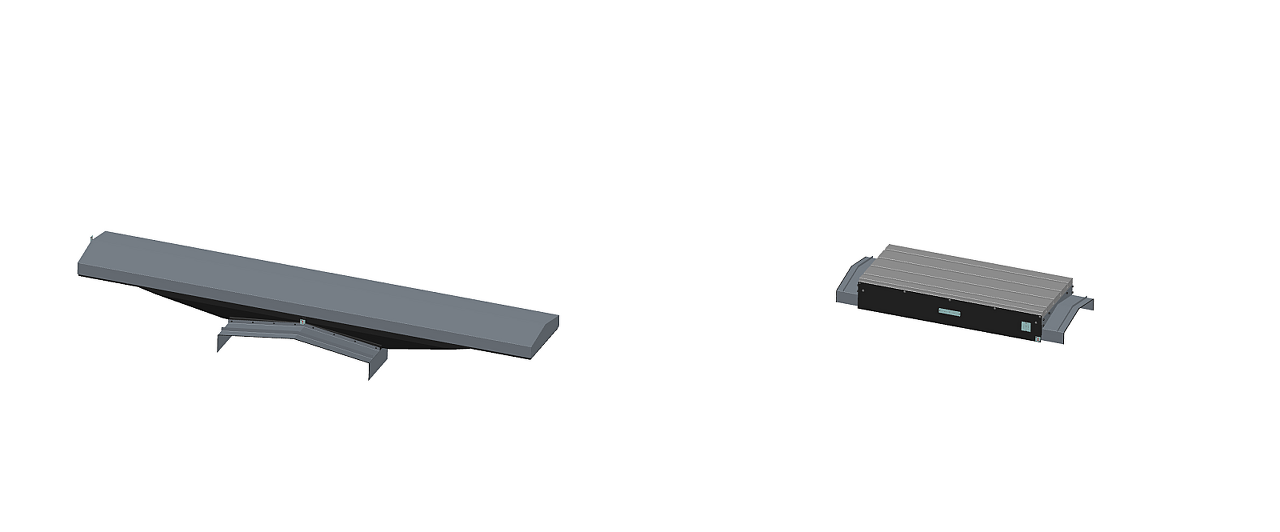
좌측 : Y축 이송되는 부분 , 우측 : X축 이송 되는 배드면
일단 합체하여 이상 유무 을 살펴봅니다.
이후 가 어렵습니다.
머신 시물레이션으로 가기 전에 가공 원점을 잡아주어야 합니다.
이유는 공구 장착 위치 (스핀들 위치)와 배드면 이 움직이는 범위와 기준점 설정 때문입니다.
이것은 각 장비 형태와 규격에 따라 다르게 사용자 가 생각해서 설정하여야 합니다.
(절대 좌표 값 적용됩니다.)
(X , Y , Z 값 적용 시 장비 모델링 움직임 적용에 영향받습니다. 부가축과 5축 시 마찬가지입니다.)
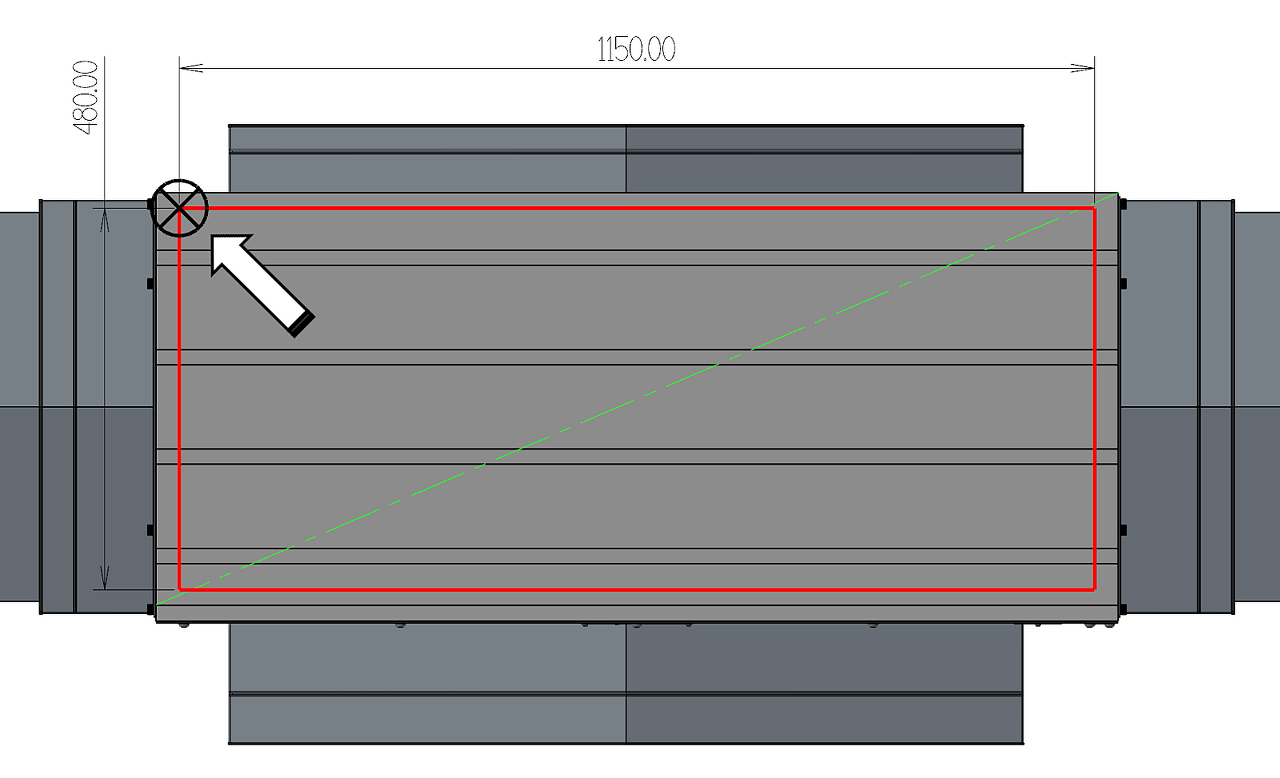
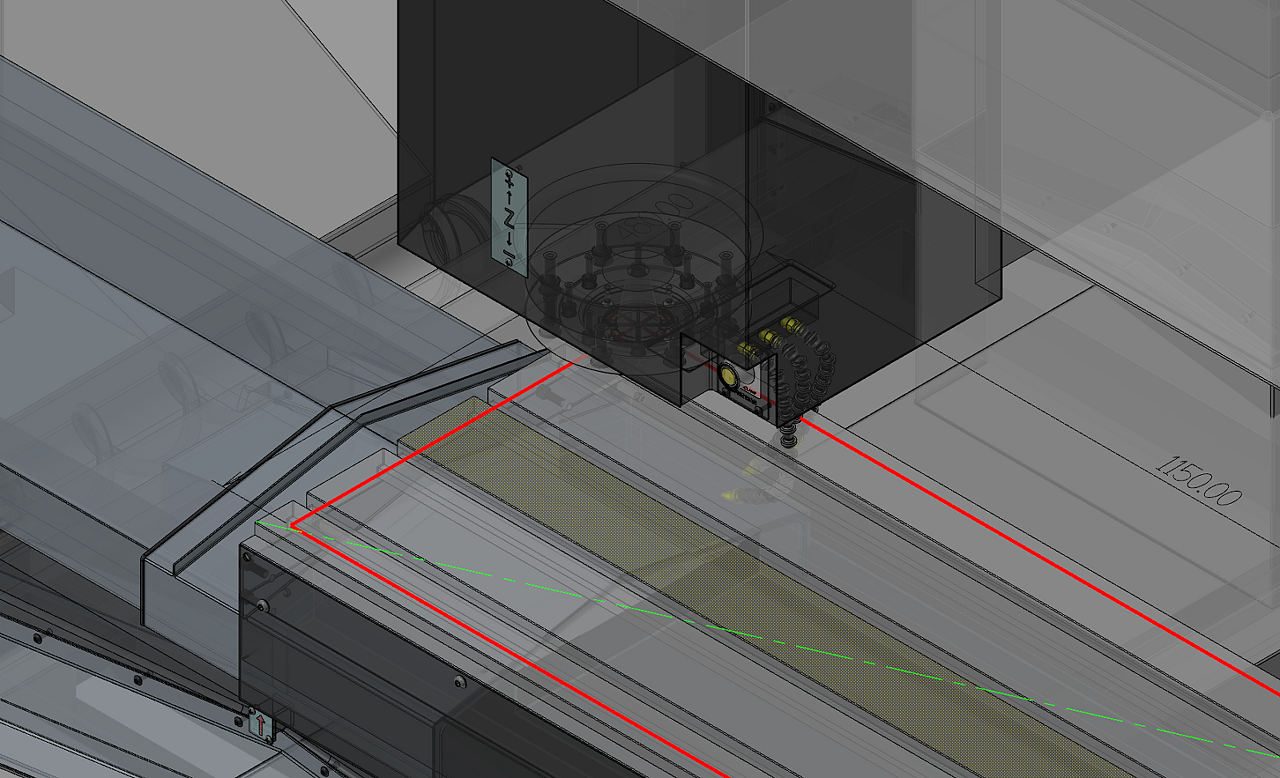
저는 우선 배드 면을 Z값 "0"으로 잡고 배드면 중 가공 영역 상단 왼쪽 꼭짓점을 X , Y "0"점으로 잡기로 하였습니다.
이유는 한번 머신 시물레이션을 설정해보시면 알겠지만 만일 배드 중앙 (X , Y) 원점으로 잡고 스핀들 Z값을 상단(원점복귀) 한 높이로 잡아 주면 가공 소재 가 항상 배드 중앙 상부 스핀들 상단에 위치합니다.
물론 머신 시물레이션 사전 설정에서 각 소재 위치 을 재설정하기 때문에 사용자 가 좌표만 잘 잡아주면 문제없지만 가능 한 실제 상황과 유사하게 진행하기 위하여 저는 위 와 같이 설정하였습니다.
* 자주 얘기 하겠지만 머신 시물 에이션 설정 과정 은 자동 과정 이 없습니다.
(사용자 가 전부 생각해서 입력해주어야 합니다. 초기 한번 만..)
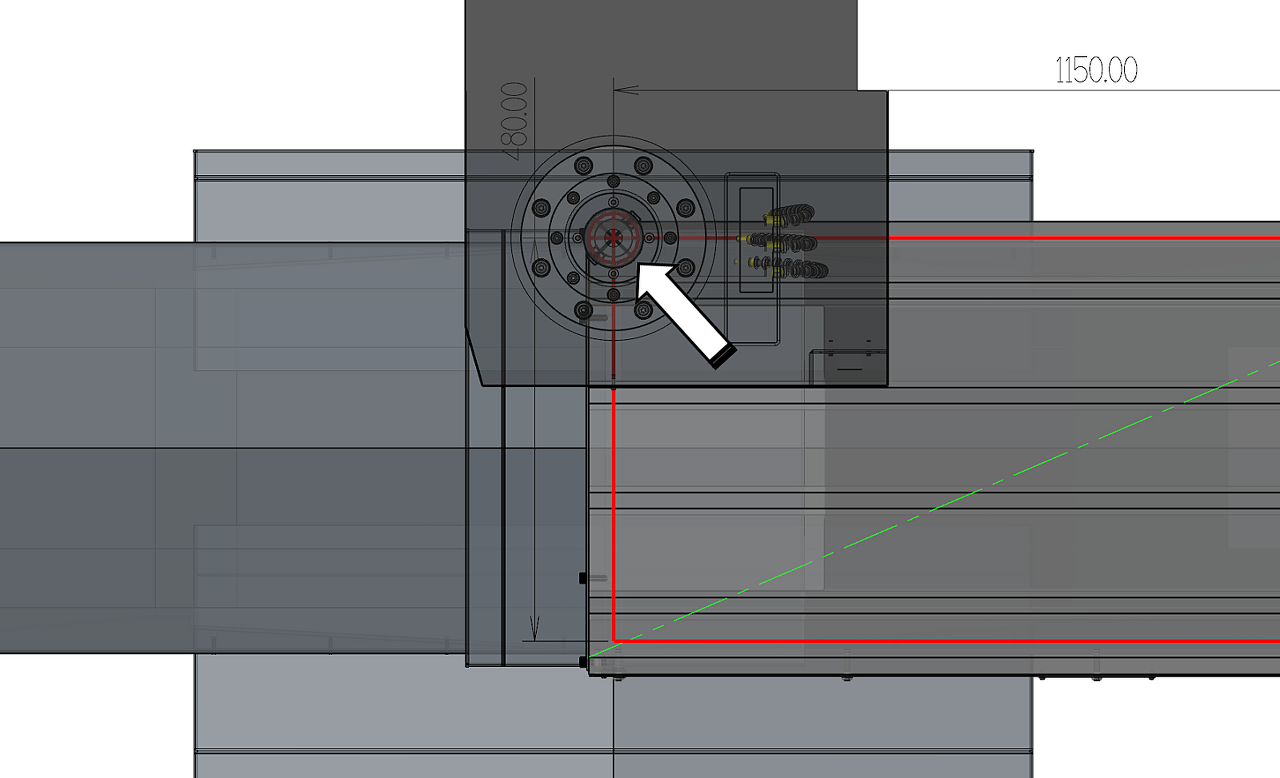
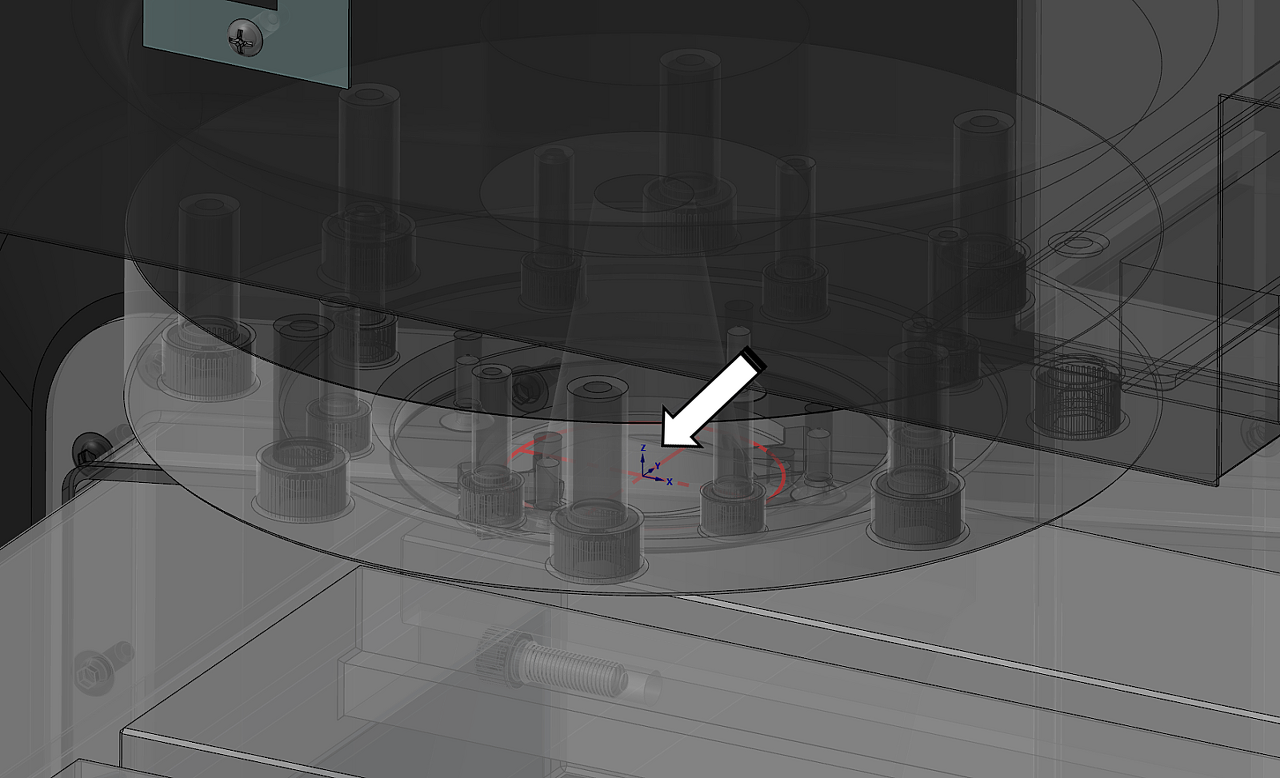
그래서 마스터 캠 상태에서 원하는 공구 위치 (스핀들 중심)을 기준으로 해서 마스터캠 원점 이동 기능 등으로 모델링을 이동합니다.
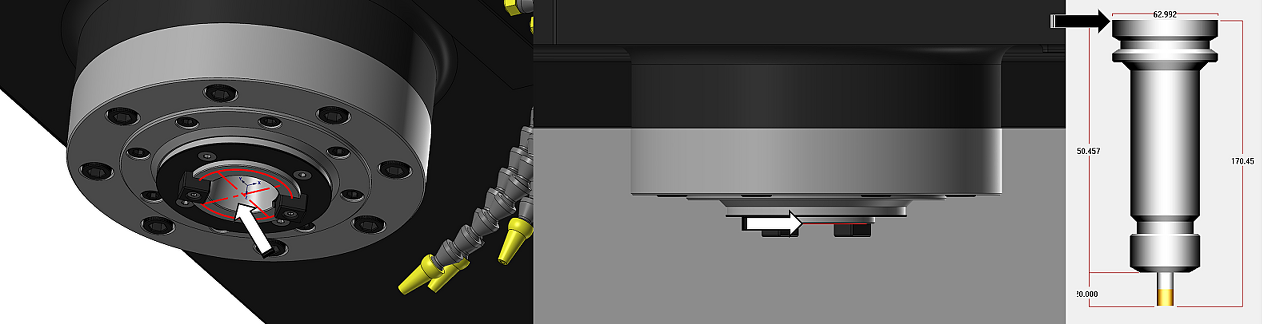
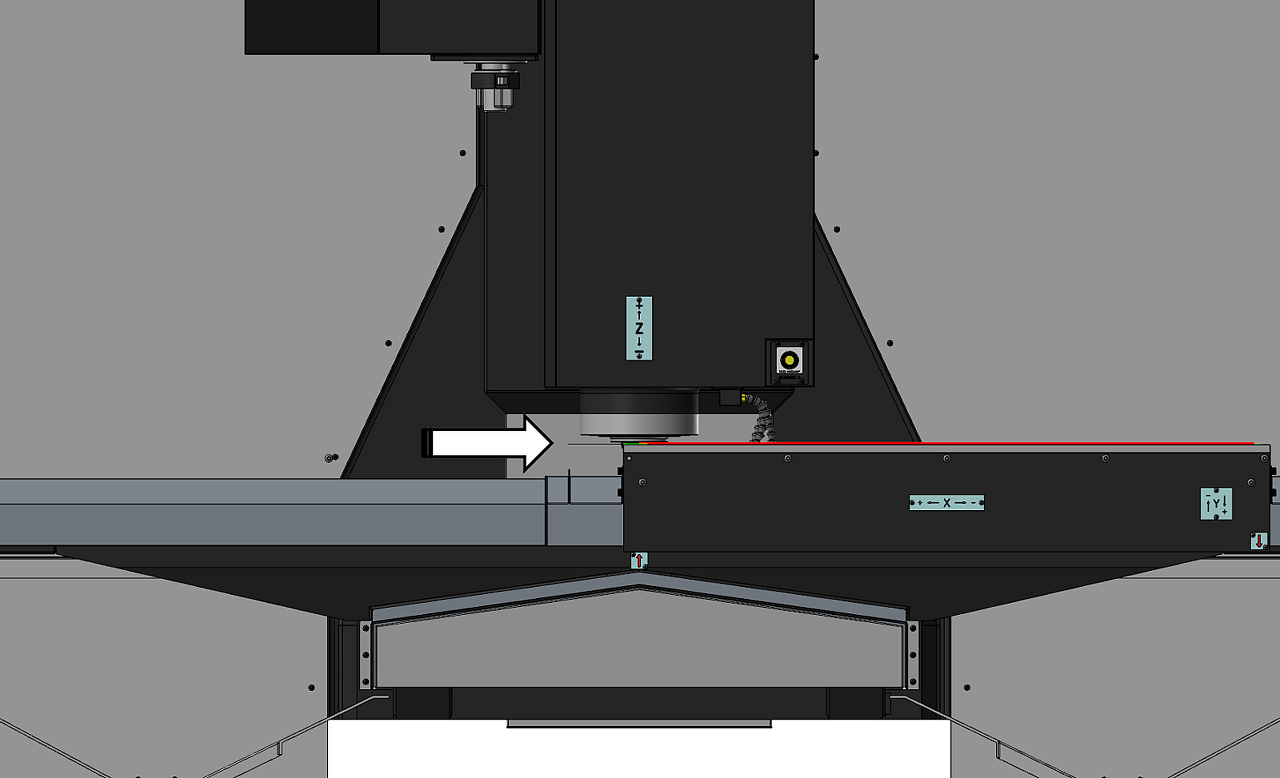
공구 원점 은 스핀들 테이퍼면 (공구 홀더 장착되는 부분) 하면 을 기준으로 하여 설정합니다.
이유는 Z 축 원점을 기준으로 마스터 캠 홀더에서 지정하는 홀더 모델링 이 스핀들과 결합되는 부분 이기 때문입니다. (실제 공구 장착하는 형태와 동일)
그리고 X , Y 축 은 배드면 가공 영역 상단 왼쪽 쪽지점을 원점으로 설정하였습니다.
이유는 나중에 다시 설명 하지만 이 원점 이 마컴의 가공 원점과 동일하게 설정됩니다.
(설정에 따라 변경 가능합니다.)
그러므로 만일 나중에 고정 구로 바이스 나 기타 지그 을 머신 시물레이션에 적용하려면 어느 정도 일정 한 위치가 필요하여 이렇게 설정합니다.
그리고 실제 가공 Z값 "0" 은 배드면으로 잡았습니다.
이유는 이 원점 이 마스터캠 가공 원점과 동일 하기에 나중에 머신 시물레이션에서 소재 원점 위치 지정 시 보통 하는 식으로 배드면 에서 얼마 올라간 (바이스 바닥 높이 라던가...) 높이 을 지정하여 실제와 동일하게 설정하기 위합니다.
여기까지 완료되면 일단 모델링 파일을 *STL. 확장자로 저장하시기 바랍니다. (모델링을 STL 파일만 입력됩니다.)
우선 폴더명을 3 AXIS-VMC로 하고 각 파트 을 각각 의 이름으로 한 곳에 모아 STL 파일로 저장합니다.
MACHINES- X AXIS : X축 장비 (배드면)
MACHINES- Y AXIS : Y축 장비 (배드 이송)
MACHINES- Z AXIS : Z 축 장비 (스핀들)
MACHINES- HOUSING : 머시닝 커버
로 구분하였습니다.
'마스터캠 관련 한 여러 이야기 > 머신 시물레이션' 카테고리의 다른 글
| 마스터캠 머신 시물레이션 생성 방법 -05 (부가축 , 인덱스 적용 방법) (0) | 2022.07.24 |
|---|---|
| 마스터캠 머신 시물레이션 생성 방법 -04 (다수 바이스 적용 방법) (1) | 2022.07.17 |
| 마스터캠 머신 시물레이션 생성 방법 -03 (머신 시물레이션 활용법) (0) | 2022.07.09 |
| 마스터캠 머신 시물레이션 생성 방법 -02 (머신 시물레이션 모델링 설정) (0) | 2022.05.22 |