


이번에는 곡면 고속가공경로 파라미터 중 절삭 파라미터의 경로 간 이동, 스팁/쉘로우 , 토로코이달 모션에 대하여 알아보겠습니다.
토로코이달 모션(Trochoidal Motion)
* 먼저 토코이달 모션(소용돌이 움직임?)은 공구 절삭 이송방법중 하나로서 일반적인 공구이송가공(윤곽)은 소재에 직선 또는 곡선으로 직접적인 절삭접촉(!)을 이루면서 진행하는 가공을 말하며 (밀링가공상 고절입의 저이송 저회 전으로 이루어지는 가공) 이러한 가공경로는 절삭공구에 걸리는 과부하로 인하여 저이송 절삭속도 유지 또는 공구파손에 취약하다는 단점이 있어 이에 대한 보완으로 개발된 공구 이송방법입니다.

* 위 원에 접한 점이 이동경로에 접하는 원운동을 하면 이동하는 것 을 토로코이드이라고 합니다.
이와 같이 가공 절삭 공구가 가공경로에 접하여 원형으로 돌아가면서 절삭이송 하는 (정확히는 절삭이송과 도피이송(칩배출)을 번갈아) 하는 가공방식을 말합니다.
파워밀이나 퓨전 360 등 일반적으로 많이 사용되는 방식입니다.(마스터캠 전용이 아닙니다.)

* 일반적인 윤곽가공 경로는 소재에 직접적인 직선형 가공경로 을 생성합니다.
* 트로코이들 모션 적용한 가공경로 경우 절삭 공구가 일정한 원을 소용돌이 형태로 일정한 비율로 가공량을 유지하며 가공합니다.
* 일반 포켓가공(고속가공)에서도 트로코이들 모션을 적용할 수 있습니다.
그럼 곡면 고속가공 경로에서 트로코이들 모션의 역할은 무엇인지 알아보겠습니다.
* 곡면 고속가공경로 중 절삭파라미터의 트로코이들 모션이 적용되는 것은 영역황삭과 수평영역 경로만 적용됩니다.
* 여기서는 절삭가공 자체 이송방식 이라기보다 공구 절삭 이송 시 가공물 형태 (부하가 급격히 발생 가능한 부분)에 따라 적용하는 방식으로 급격한 가공부하 (가공경로 가 좁아지면서 모이는 부분, 또는 미절삭 소재량이 급격히 높아가는 (한 번에 많은 양을 절삭하게 되는 예상 가공경로)등 공구 이송 관련 과부하 방지 대책입니다.
* 그러므로 실제 가공경로는 일반적인 해당 가공경로 종류별로 진행되고 (거의 포켓경로 유사한) 일부 절삭 과부하 가 예상되는 부분에 한하여 트로코이들 모션을 적용 합니다.

해당 기능 절삭파라미터 내용은 다음과 같습니다.


위쪽이 디폴트(기본값)로 적용되는 트로코이들 모션 파라미터 값이고 아래쪽이 미적용 상태 을 보여줍니다.
각 파라미터 적용 값의 내용은 다음과 같습니다.

주목적은 깊은 골짜기 같은 가공형태시 일반적인 가공경로 적용 시 한 번에 지나가서 공구 과부하가 예상되는(이라고 하지만 사실 모든 가공경로에 전반적으로 적용) 부분에 트로코이들 모션이 들어갑니다.
* 즉 가공경로 영역 중 코너 부분에 진입 시 그대로 진입하지 않고 트로코이들 모션(돌면서 진입) 이 시행됩니다.
* 경우에 따라 다르지만 코너 진입 시 공구 부하로 공구 파손 되는 경우 을 많이 줄일 수 있습니다.
다만 가공경의 특성상 가공시간(이송시간)이 늘어나는 경우가 많습니다.
* 다만 작용하기 나름이지만 만일 코너 진입 때문에 전체적이 절삭 이 송속 도을 줄이는 것보다 일반적인 절삭 가공이송 속도는 빠르게 하고 코너진입 시 이러한 트로코이들 모션으로 공구 부하을 줄일 수 있습니다.
적용되는 예..


가공영역 안에서 루프유지
* 전체적인 가공영역 중 코너 진입 시 최소 루프 반경 적용 여부 설정입니다.

* 코너 진입 시 작은 루프가 적용됩니다.
경로 간 이동

경로간 이동은 가공경로 간 (Z값으로 구분 되는)의 연속적으로 연결되지 않은 경우 각 가공경로간 이동 방법을 정의 하는 것입니다.
이러한 경로 간 이동은 해당 가공경로에 따라 다른 형태를 정의합니다.
1. 최적화 황삭
* 위 가공경로 에만 적용 되는 경로 간 이동 (정확히는 공구 소재 진입(내측)에 대한 정의)입니다.
공구진입을 헬릭스 (나선형)으로 하는 것을 원칙으로 하며 보편적인 진입 방법입니다.
* 공구가 가공영역 (소재) 내측으로 진입 시 적용됩니다.

진입방법
공구 진입 시 적용되는 헬릭스 방식을 정의합니다.
1. 헬릭스만
공구 진입을 가공영역 중 적절하다는 위치로 헬릭스 진입을 합니다.
해당 가공경로 완료 후 수직 복귀이송 후 다시 다음 가공영역으로 공구진입 시 헬릭스만 으로 진입하게 됩니다.
2. 완전히 묻히는 내측을 따라서 헬릭스
공구 진입시 헬릭스로 진입한 후 가공영역의 Z값을 유지 한 상태로 내측 가공영역의 중심선 을 따라 한바퀴 가공(풀스로팅 가공) 한후 해당 가공경로 형태로 가공을 시작합니다.
* 먼저 풀슬로팅으로 한 바퀴 가공하는 이유는 가공경로 특성상 처음 진입 시 먼저 가공과 별도로 공구가 진입할 수 있는 회랑(진입가능한 골짜기)을 먼저 생성하여 다음 실 가공경로 이송 시 공구의 과부하 을 덜자고 하는 방법입니다.
* 가공물 형태상 가공경로 가 가공물 중간을 트로코이드 가공이 어려운 경우 이러한 가공 공구가 지나가기 편하게(?) 미리 경로를 가공해 놓는 것을 말합니다.

3. 내측을 트로코이드 하면서 헬릭스 적용
위 "완전히 묻히는 내측을 따라서 헬리스 " 경우 초기 풀슬로팅 가공 시 공구에 과부하 가 걸리는 경우가 있어 간단하게만 이 한 바퀴 경로 을 트로코이드 을 적용 하여 가공하게 하는 방식입니다.
4. 프로파일
공구 진입을 헬릭스방식 진입으로 하데 그 헬릭스 형태를 원형 이 아니고 그 가공영역의 형태(프로파일)를 따라 램프 또는 헬릭스로 진입하는 방법입니다.
* 가공포켓이 어떠한 단일경로처럼 형성된 경우 그 경로 형태와 유사하게 진입경로 가 생성됩니다.
* 진입하게 될 가공영역 형태에 따라 헬릭스 또는 램프 형식이 적용됩니다.

5. 내측의 적용
만일 가공 공구 진입 (Z값)이 큰 경우 또는 가공물 중앙부(?)에 미가공부분(아일랜드형태)이 존재하는 경우 이러한 형태 을 따라서 크게 헬릭스 형태로 공구 진입 하는 경우입니다.
* 특이한 점은 통상 헬릭스 공구진입이 아니고 램프 경로 형식으로 크게 진입하여 일종의 가공 준비 경로 을 생성 후 가공 시작 하는 방식을 얘기합니다.
* 공구진입 프로파일 형태는 가공물 내측에 아일랜드 형태가 있으면 그 아일랜드 형태를 유사하게 , 없는 경우는 가공영역을 기준으로 공구진입 경로가 생성됩니다.

진입 방법 별로 모의가공

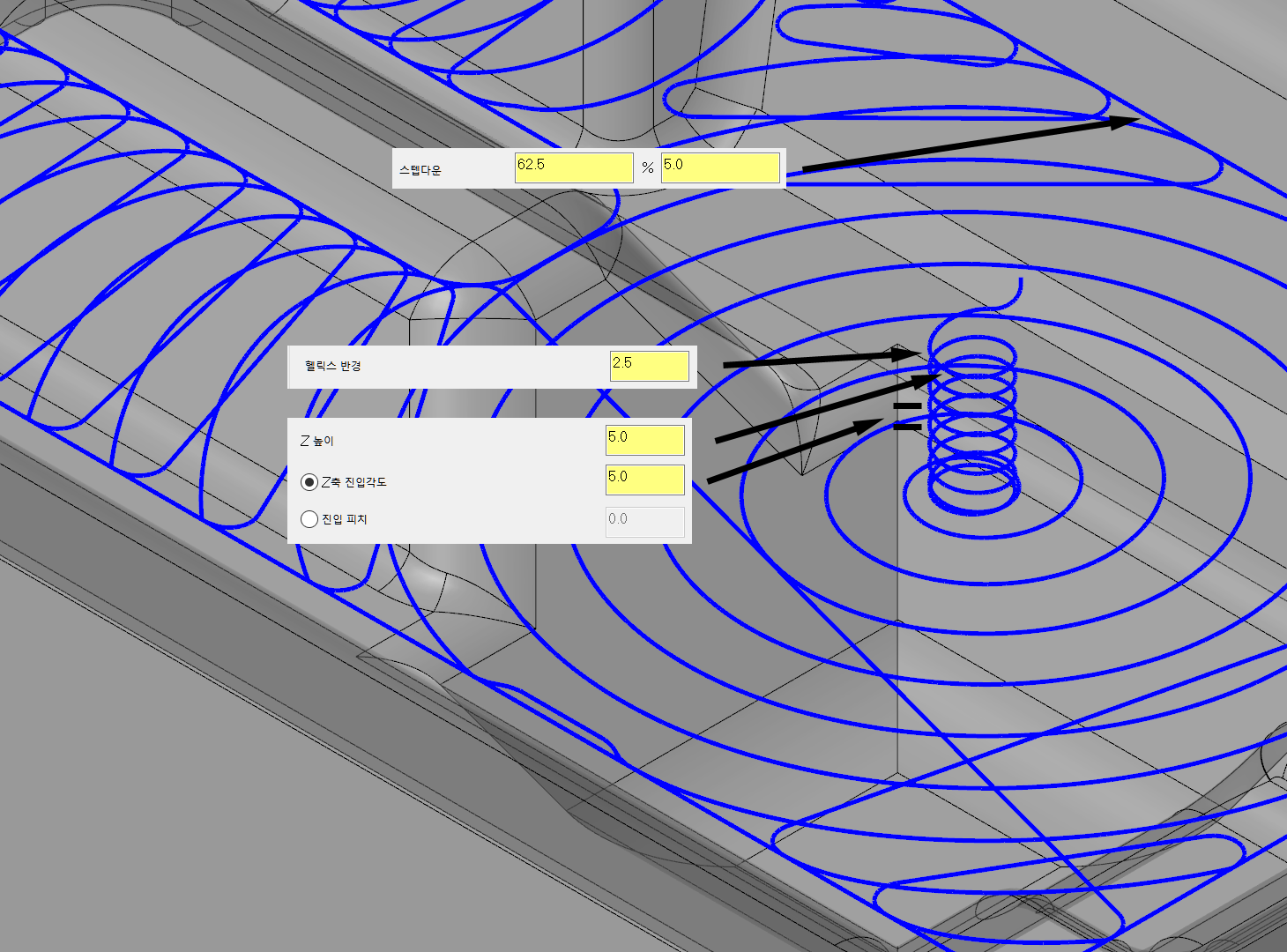
헬릭스 반경 & Z높이
진입하는 헬릭스의 반경(공구중심 기준)을 정의합니다.
* 헬릭스 반경은 해당 가공경로 생성 시 자동적으로 적절히 생성 하나 만일 전공정 등 작업자가 진입홀 가공을 먼저 한 경우 이에 적용하여 적절한 진입 헬릭스 공구 직경에 기준하여 진입 반경을 지정합니다.
진입하는 헬릭스 진입경로 생성 시 어느 시점부터 헬릭스 이송이 시작되는지 을 정의 합니다.
* 적용되는 Z값은 지정한 Z높이 + 현재 가공완료된 높이에서 다음 가공할 높잇값 차이만큼 합한 규격에서 헬릭스 이송이 시작합니다.
* 간단예 만일 현재 가공 완료된 Z-5.0에서 다음 가공시작 Z값 -10.0 그리고 Z높이 을 5.0을 입력 시
절댓값 적용 시 Z 5.0 에서 Z-10.0 까지 총 15.0만큼 헬릭스 이송 적용
증분값 적용시 Z값 5.0 + 선가공 Z값 -5.0 - 후가공 Z값 10.0 = 10.0 즉 Z0.0부터 헬릭스 이송 적용


* 만일 절댓값 적용 시 각 Z값별 가공경로간 이송은 공구 이송 높이(절대값) 에서 일정하게 이루워지며 증분값 적용시 각 적용 파라미터 값에 기초하여 이루어집니다.

즉 위와 같이 각 가공경로 Z값별로 일정한 높이에서 증분값으로 공구진입(헬릭스)이 이루어집니다.
이러한 적용값은 (절대/증분값) 은 링크 파라미터 값에 준하여 적용됩니다.

Z값 파라미터 값은 다음과 같은 적용을 합니다.

진입 이송속도 / 회전수
공구 헬릭스 진입 시 설정된 가공정의 의 절삭 조건 (이송피드 , 회전수) 을 별도로 설정 가능 합니다.

해당 공구의 진입 시 적용되는 (가공경로 정의에 설정된 피드,회전수 외로) 이송속도(FEED) 와 회전수 을 입력합니다.
* 적용은 진입시 헬릭스 이송 시만 적용됩니다.
절삭 스핀들 회전수 도달 전 정지시간 : 만일의 경우 실 가공경로 회전수와 진입 이송경로 회전수가 차이 나는 경우 이러한 회전수 변환이 이루어질 동안 공구가 절삭이송을 대기할 정지 시간을 정의합니다.
2. 영역황삭, 수평영역
* 위 2가지 가공경로 선택 시 적용되는 경로 간 이송 방법입니다.

* 역시 특성상 가공영역(소재) 내측으로 공구 진입 시 적용되는 방식입니다.
* 가공경로 특성상 공구 과부하 (깊게 공구 진입하고 저 절입으로 가공하는 방식이 아닌)가 걸리지 않는 방법에 쓰입니다.
각 진입 방법 의 차이점은 아래와 같습니다.

* 위 예와 같은 경우 영역황삭 가공경로이라 현재 마스터캠이 판단하기에 두 군데 가공영역 으로 판단하여 두군데 진입이 이루어집니다.
* 헬릭스 진입의 경우 헬릭스 진입 반경 규격을 정의할 수 있습니다. (진입홀 존재 시)
* 단 만일의 경우 해당 가공영역이 공구경에 비하여 작은 경우 자동적으로 프로파일 형태 진입이 이루어집니다.
진입 시 이송속도
진입하는 공구의 이 송속 도을 해당 가공경로 정의 Z축이송속도 기준으로 할 것인가 아니면 해당 가공경로 절삭이송속도 로 할 것인가을 정의합니다.
Z 높이, Z축 진입각도 , 프로파일 길이 제한
진입하는 공구의 진입 시작하는 Z축 높이 , 진입 각도 그리고 진입 프로파일 의 길이 제한을 정의 합니다.


* 경우에 따라 프로파일 진입 적용 시 매우 작은 가공영역 구역이라 생성되는 프로파일 이 너무 작게 (짧게) 설정되는 경우가 있어 급격히 공구진입이 발생할 수 있으니 먼저 생성되는 프로파일 경로 길이의 최소 한계(짧아지지 않도록)를 설정합니다.
* 프로파일 길이제한 값 보다 긴 진입경로 가 생성 됩니다.
3. 이송 형태
* 위 이송형태 경로 간 이송 파라미터는 정삭 가공경로 (워터라인, 스켈롭, 일정한 스켈롭 , 펜슬, 하이브리드)에서 적용됩니다.
적용되는 것은 각 가공경로 간 (Z값으로 구분되는) 이송되는 형태 을 정의 합니다.

접하는 램프 : 가공곡면에 기준하여 곡률이 있는 곡선으로 이어지는 각 가공경로 간 이송경로 을 생성 합니다.
램프이송 : 가공곡면에 기준하여 곡률이 있는 직선적인(?) 경로로 각 가공경로 간 이송경로 을 생성합니다.
직선형태 : 가공곡면에 기준하여 곡률이 있는 수직적인 직선 경로 로 각 가공경로간 이송경로 을 생성 합니다.
* 모든 이송 경로는 가공곡면에 일정한 간격을 유지하며 이송되며 각 가공경로 간 연결지점에 대한 접하는 각도의 차이입니다.

이송형태 이송속도
각 가공경로 간 이송할 때 이송속도 을 해당 가공경로 정의에 있는 Z 축 이송속도 을 적용 할 것인지 절삭 이송속도 을 적용 할것 인지 정의 합니다.
4. 이송형태 (끝단 이송)
위 이송형태 파라미터는 해당 가공경로에서만 적용됩니다. (라스터, 나산 , 방사선, 투영, 블랜드)
* 이 이송형태(끝단) 은 공구중심영역 경계선에 기준하여 생성됩니다.
* 경로 형태는 공구중심영역 경계선을 기준으로 가공경로가 도달할 경우 가공경로 제어 파라미터 설정에 따라 다시 복귀하는 (재 진입하는) 경로 형태 을 정의 합니다.

루프 이송
루프(곡선 형태)로 가공경로의 재진입이 이루어지는 방식입니다.

* 진출, 재진입 지점은 공구중심영역 경계선 기준이며 루프의 규격은 절삭 간격으로 정의됩니다.
* 위 이미지상 살짝 위치가 어긋나 보이는 것은 가공경로가 살짝 표면에서 떨어져 있어서 그런 것입니다.
* 오른쪽 공구 외측 경우 공구가 완전히 가공영역(공구중심영역)을 벗어나면 Z 축 방향으로 이송이 발생할 수 있으니 가능한 가공영역 범위 내 공구가 겹치도록 설정하셔야 합니다.
* 만일 가공결을 완전히 일정하게 유지할 경우 외측으로 진출, 진입하여야 합니다.
직선형태
직선 (진출 후 바로 진입 위치로 직선 이송) 형태로 가공경로의 재진입이 이루어지는 방식입니다.

* 저속이송 또는 대구경 커터 이송 시 적용되는 방식입니다.
5. 스팁/쉘로우 (Steep / Shallow)
각도 : 가공곡면의 곡률(얕고 가파른) 정도에 따라 가공범위 을 정의 하는 기능입니다.
Z깊이 : 가공경로 생성 범위 을 Z값 지정(한계범위)을 정의하는 기능입니다.
접촉 : 가공영역에 대한 에어컷(절삭 불가 영역 절삭이송)에 대한 정의입니다.

각도
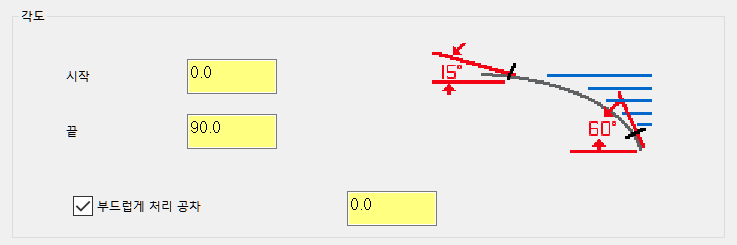
가공곡면 중 곡률 경사가 있는 경우 가공경로 생성 범위를 각도 값 지정으로 정의합니다.
시작 : 가공경로 가 생성 될 수 있는 가장 얕은 경사 (각도)을 정의합니다.
끝 : 가공경로 가 생성 될 수 있는 가장 가파른 경사 (각도)을 정의합니다.
부드럽게 처리 공차 : 위와 같이 정의된 가공범위 내의 가공경로 생성 공차(곡면의 곡률 부드러움 적용)를 지정합니다.
* 해당 가공경로 의 가공공차 와 무관하게 적용됩니다.
예을 들면..

* 가공경로 생성 범위 을 시작 0도 , 끝 90도로 지정한 가공경로, 시작 15도 , 끝 75도로 지정한 가공경로

* 가공경로 생성 범위 을 시작 30도 , 끝 60도로 지정한 가공경로, 시작 0도 , 끝 25도로 지정한 가공경로(집중된 부분)
* 마이너스 또는 90도 이상 은 지정 할 수 없습니다.
* 간혹 일부 매우 얕은(수평에 가까운) 가공면의 가공경로 생성 (밀집하게) 대비책으로도 사용 하나 크게 효과는 없습니다.
Z깊이
해당 가공경로 정의에서 적용되는 가공범위 을 Z값 기준으로 한계값을 정의합니다.

가공 여유 감안 조절 : 가공경로 생성 시 가공여유 (모델 도형에서 가공도형 벽면, 바닥면 여유값)을 전체적으로 적용합니다.
* 이것을 체크하면 해당 가공경로 정의에서 절삭 Z간격 값을 무시하고 가공 곡면의 가공여유 을 준 값을 우선적으로 적용합니다.
* 경우에 따라 가공면이 평면부 경우 해당 가공경로 Z절삭 간격에 어긋난 경우 가공경로가 생성되지 않는 경우를 방지할 수 있습니다.
한계 인식 : 현재 가공물(솔리드)의 모델도형에서 정의한 가공물의 대한 최소 Z값과 최대 Z값을 자동으로 산출하여 아래 최소 깊이값과 최대 깊이값에 적용합니다.
* 현재 작업화면에 표시된 가공물(솔리드)에 기준하지 않고 모델도형에서 정의한 가공면(가공도형)에 기준하여 산출됩니다.
예을 들면..

전체 솔리드 깊이는 Z-50.0이고 실제 가공하는 포켓은 깊이 Z-35.0인 경우..

만일 전체 솔리드 을 가공면(가공도형)으로 정의하고 한계인식 버턴을 클릭하면 전체 솔리드 바운더리 인 최소 Z0.0에서 최대 Z-50.0을 적용합니다.
그리고 만일 가운데 포켓 부분(Z-35.0)을 가공면(가공도형)으로 정의하고 한계인식 버턴을 클릭하면 포켓 부분 바운더리 인 최소 Z0.0에서 최대 Z-35.0으로 적용됩니다.
접촉
가공경로 생성 시 가공경로 가운데 가공면과 가공공구 접점이 떨어지는 부분(에어켓)을 방지하기 위하여 가공면에 가공공구가 접촉(가공여부와 관계없이) 하도록 가공경로 을 생성하도록 유도합니다.
* 만일 공구가 접촉할 수 없는 가공경로가 생성될 수 없도록 공구이송(복귀 동작)을 실시합니다.
납부 접촉 : 가공면과 공구가 접촉하는 부분만 가공경로 을 생성 합니다.
공구 어셈블리 접촉 : 공구가 가공진입 시 공구중심영역을 경계로 시작으로 가공경로에 진입합니다.
* 이 옵션은 경우에 따라 소재 외부 테두리 부분 미절삭 발생을 방지 하기 위하여 가공 시 최외곽부 을 한번 가공경로 을 생성 하게 하는 옵션입니다.


'마스터캠 2021 기능 교육 자료(초안) > 3D 곡면 , 솔리드 적용 가공 경로 관련' 카테고리의 다른 글
| 마스터캠 3D 가공경로 설명 곡면 고속가공경로-7 (공통 파라미터-홈/참고점) (1) | 2023.03.12 |
|---|---|
| 마스터캠 3D 가공경로 설명 곡면 고속가공경로-6 (공통 파라미터-링크파라미터 ) (0) | 2023.03.01 |
| 마스터캠 3D 가공경로 설명 곡면 고속가공경로-4 (공통 파라미터-가공제어-공작물) (0) | 2023.02.21 |
| 마스터캠 3D 가공경로 설명 곡면 고속가공경로-3 (공통 파라미터-가공제어-공구중심영역-2) (0) | 2023.02.18 |
| 마스터캠 3D 가공경로 설명 곡면 고속가공경로-2 (공통 파라미터-가공제어-공구중심영역) (0) | 2023.02.12 |