


이번에는 저번 게시글에 누락 & 추가된 부분을 설명하겠습니다.
우선 3축 장비 테이블에 올라간 바이스의 페렐블록을 추가하는 방법을 설명하겠습니다.
내용은 간단합니다.
먼저 정해진 규격(높이값)의 페럴블럭을 준비한 후 일단 한쌍의 페럴블록이 고정죠와 이동죠의 내측면에 붙어 있다는 전제조건으로 배치를 해놓습니다.
* 항상 STL 형식 파일로 저장 할때는 마스터캠 모델링 원점위치에 기준하여 저장하여야 합니다.

머신 시뮬레이션으로 들어가서 먼저 해당 머신정의(사용자 머신 정의 : 여기서는 M1_3 AXGEN_VMC)를 불러드립니다.
그리고 머신정의 수정모드로 들어가서 페럴블럭을 추가할 바이스 항목을 선택합니다.
* 머신정의 추가 하는 방법이 계속 앞전에 설명한것의 반복이 되므로 생략 간략하게 설명하겠습니다.

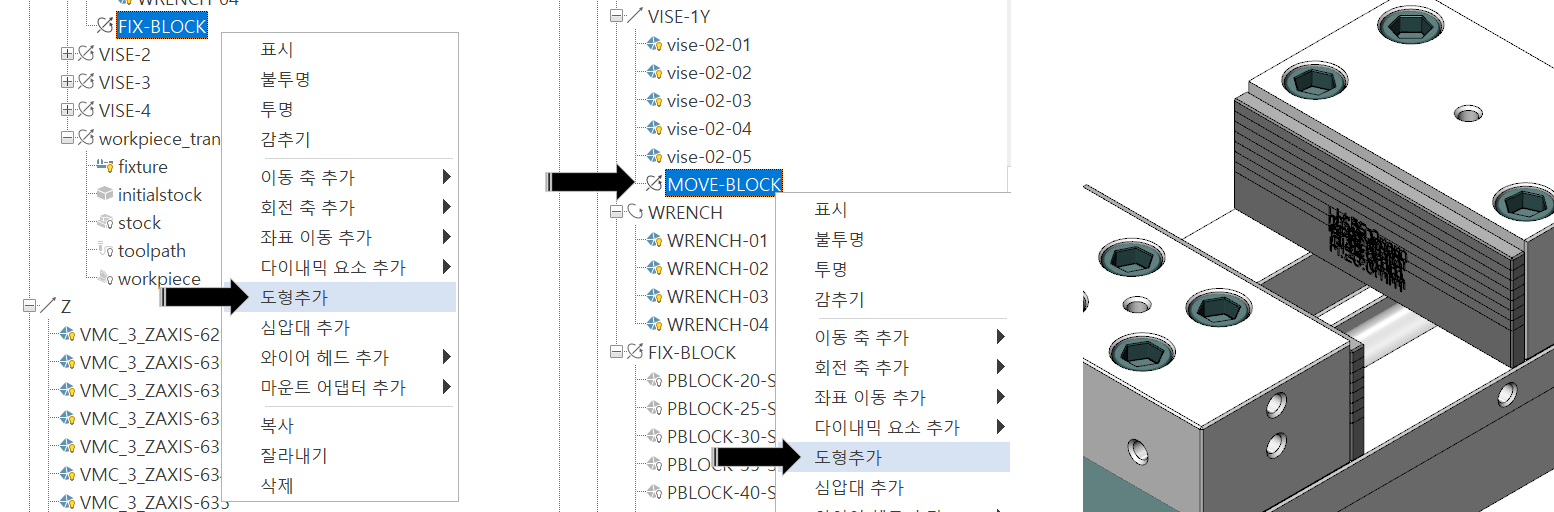
추가할 바이스 항목을 선택후 별도의 항목으로 페렐블록을 생성하기 위하여 다이내믹 요소 추가 - 단일 작업공작물 세트를 선택하여 해당 페렐블록 항목을 생성합니다.
* 이때 계속 바이스 루트항목을 선택하는 것이 아니고 고정죠는 바이스 루트항목에 있지만 이동죠는 이동죠항목에 있으므로 이동죠 페렐블록 항목 생성시는 이동죠 항목을 선택하여야 합니다.

각 페렐블럭 항목(FIX-BLOCK / MOVE-BLOCK)에 각각 해당 페렐블럭 STL파일을 도형 추가 기능을 이용하여 해당 요소를 추가합니다.
만일 제대로 생성 추가 되면 아래와 같이 각 바이스 이동죠 이동시 같이 붙어서 연동 이동이 가능합니다.
여기까지 되면 나머지 바이스에서도 같은 방식으로 페렐블록을 추가하시면 됩니다.
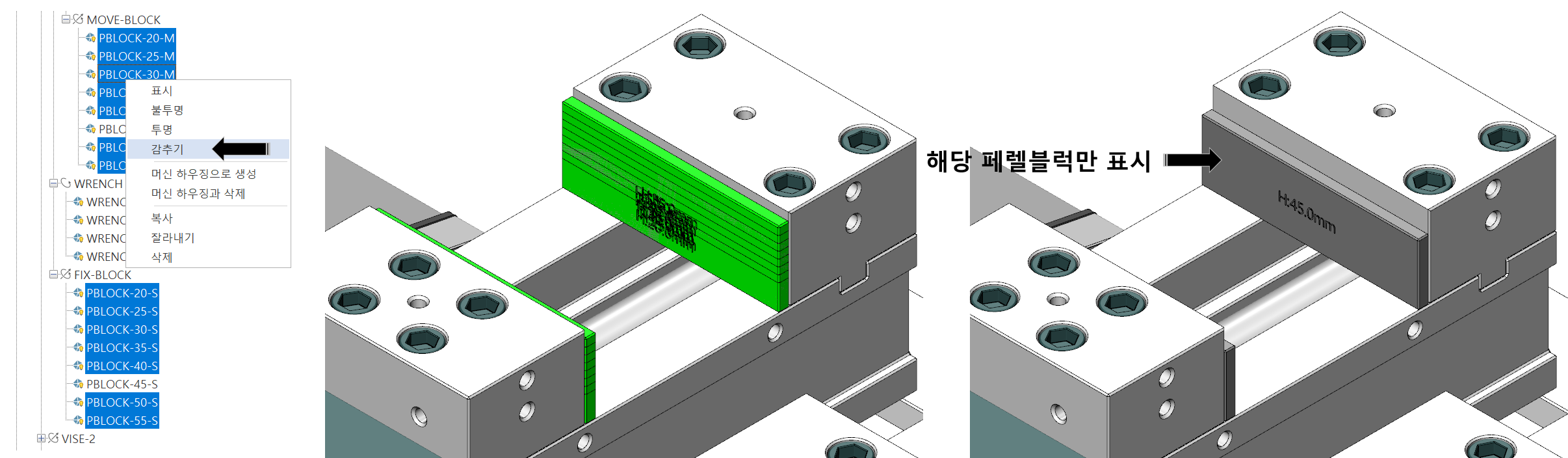
그리고 머신 시뮬레이션 적용 시 해당 사용할 규격의 페렐블록만 표시(불필요 페렐블럭만 선택하여 감추기 기능으로 미표시)하여 사용하시면 됩니다.
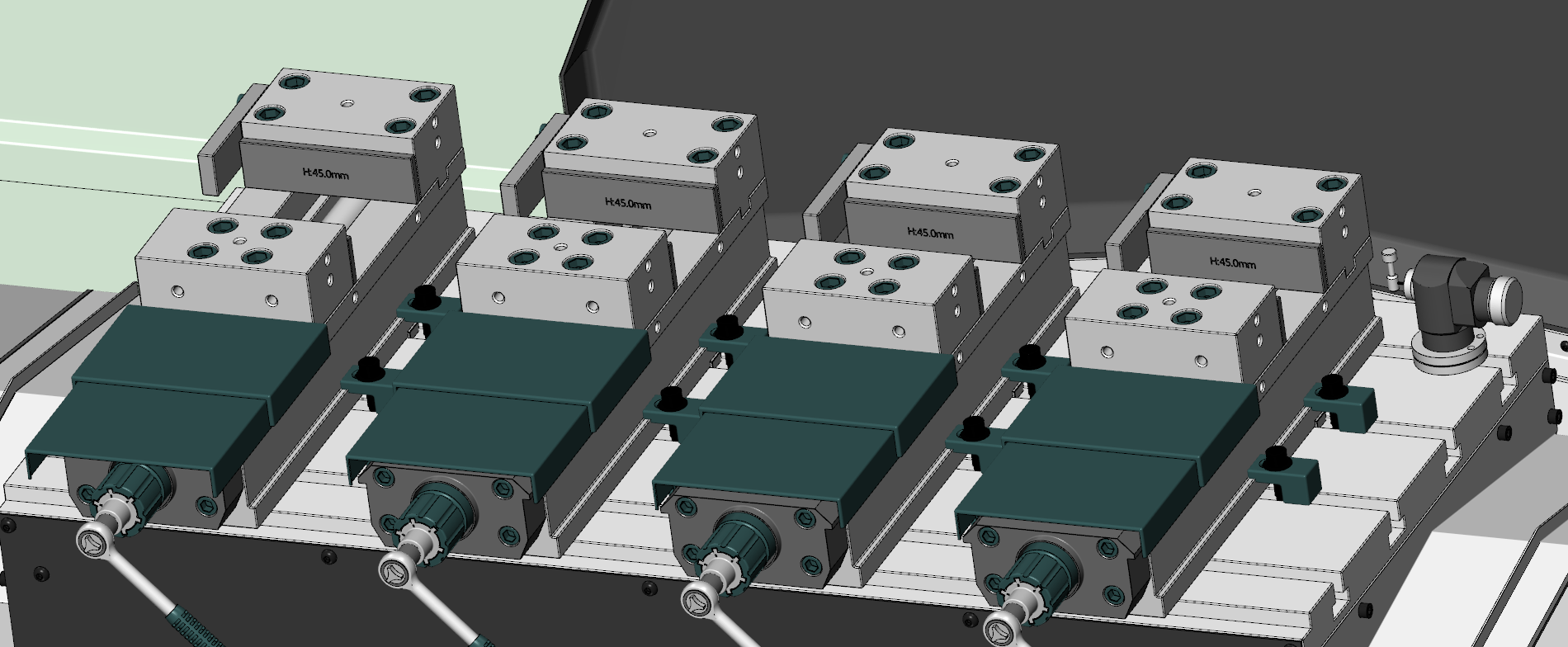
이것을 마무리하면 아래와 같이 각 바이스 별로 페렐블록을 표시할 수 있습니다.
그리고 보너스으로 공구체인지 시스템(매거진 포트, 공구 체인지암)을 작동할 수 있게 설정해 보겠습니다.
먼저 해당 부분에 대한 모델링을 생성합니다.

그리고 해당 모델링 요소(매거진 회전포트, 공구체인지 암)를 추가하여야 하는데 이러한 도형요소는 사실상 고정적인 위치에서(각축 이송장치 움직임과 관계없이) 움직이므로 머신 하우징 항목 하위 트리구조로 도형요소 추가 합니다.

* 해당 이동항목은 크게 2가지입니다.
1. 매거진의 대기포트의 90도 회전
(매거진 자체는 회전하지 않습니다.)
2. 공구 체인지 암의 상하 이동과 회전
먼저 매거진 대기 포트를 생성하겠습니다.
고정되는 도형요소(매거진 자체)는 먼저 머신 하우징 항목으로 추가하고 대기포트 만 별도 항목을 만들어 회전 이동을 설정합니다.
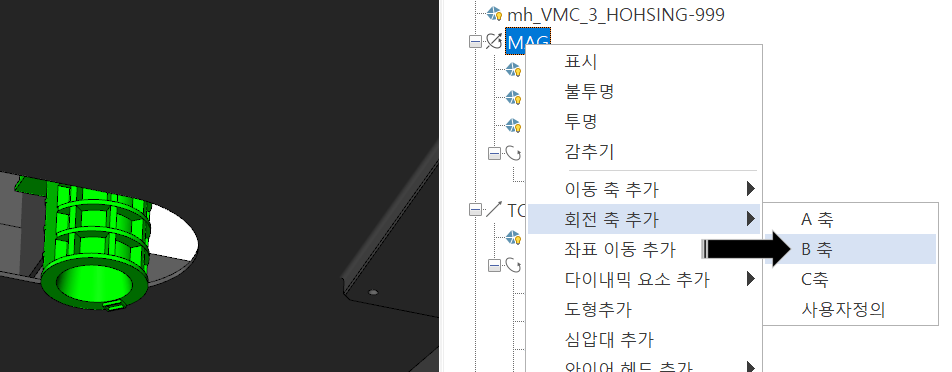
머신 하우징 항목 하위트리 항목으로 하여 회전축 추가 - B 축 항목 추가로 합니다.
* 정확히는 머신 하우징 항목 - 매거진(고정체) 항목 - 대기포트(회전체) 항목을 생성합니다.
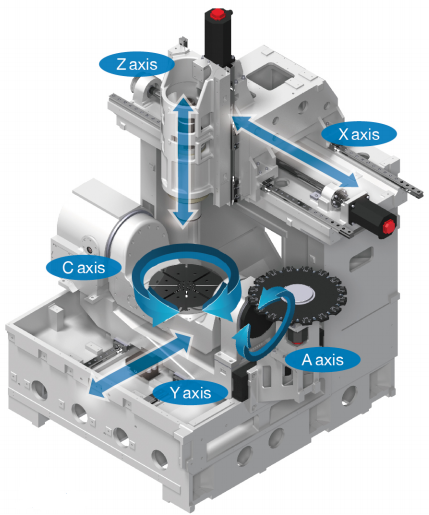
* 왜 B 축 이냐면 기본적인 머시닝 축방향으로 보면 B축 방향 이므로....(항상 주의하세요)
대기포트 항목의 도형추가로 해당 도형요 소을 추가 후 하단 세부항목에서 먼저 마스터캠에서 측정한 대기포트의 회전축 좌표값을 대기포트의 회전 기준점 좌표에 적절히 입력해 줍니다.
그리고 90도로만 회전하여야 하므로 한계값에서 최대 회전 값을 90으로 입력합니다.
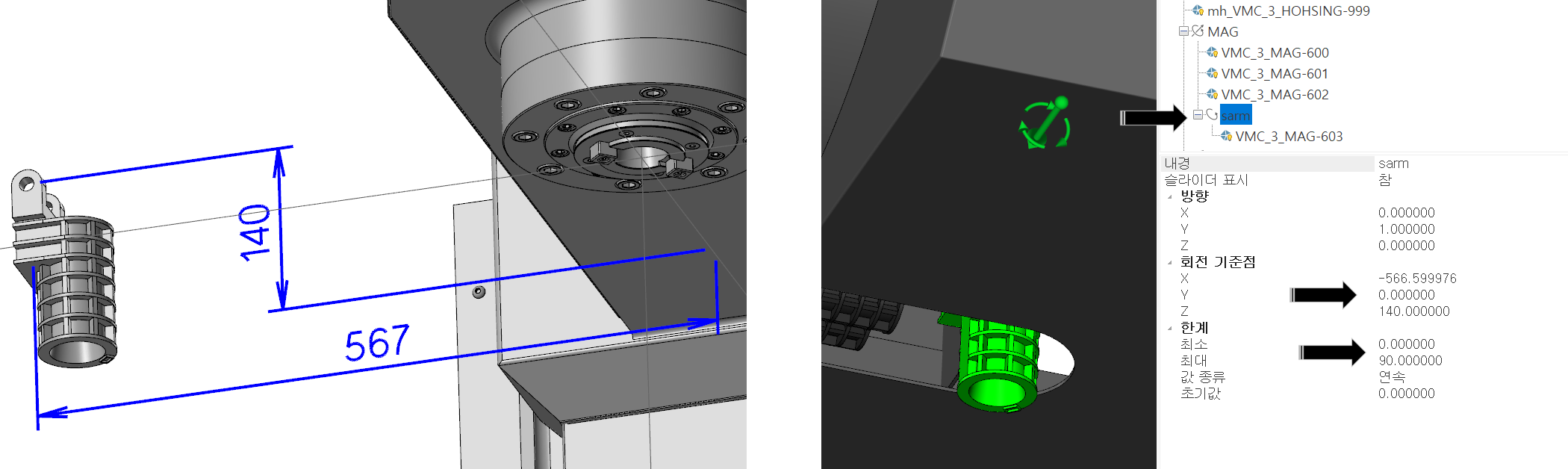
그럼 대기 포트를 회전시킬 수 있습니다.

다음은 공구 체인지 암입니다.
공구 체인지 암은 수직 이동과 회전이동이 겸하게 되어 있습니다.
그러므로 이동 항목이 2가지 따로 생성하여야 합니다.
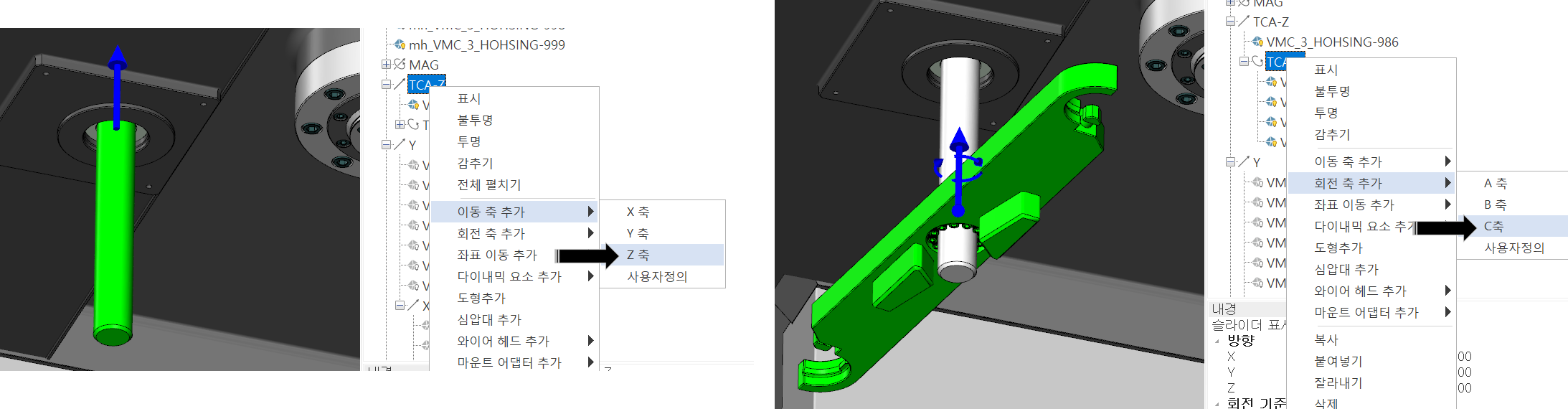
먼저 수직이동 항목으로 수직 회전축이 되는 기둥만 따로 항목을 생성하여(머신 하우징 하위 트리항목으로 이동축 추가 - Z 축) 도형요소 추가을하고 기둥(회전축)의 하위 트리항목으로 공구 체인지 암 항목을 생성(기둥(회전축 항목) 선택 후 회전축 추가 - C 축)합니다.
공구 체인지 암의 회전축 좌표 값도 미리 산출하여 공구 체인 암 항목의 세부 항목에서 회전 기준점 좌표값을 입력합니다.

각 해당 항목의 이동방향과 이동량을 산출하여 한계값에서 이동 범위를 설정해 줍니다.
전부 무사히 설정하면 다음과 같은 움직임을 볼 수 있습니다.
여기 까지는 3축 머신정의 기본적인 장비 설정이 끝났습니다.
이제 이 생성된 머신정의를 머신 시뮬레이션 머신목록에 등록하여 사용하여야 합니다.
지금까지 생성된 머신 정의 관련 파일(머신 정의 도형요소(모델링) STL형식 파일, 마스터캠 머신 시뮬레이선 정의 파일(*. xml파일))이 저장된 폴더를 해당 마스터캠의 머신 시뮬레이션 폴더(C:\Users\Public\Documents\Shared Mastercam 2021\MachineSimulation\MachSim)의 하위 폴더로 복사하시면 됩니다.

* 만일 마스터캠 머신 시뮬레이선 머신정의 저장 폴더에 사용자 지정 폴더를 생성하여 그곳에 사용자 머신정의 파일(STL 파일)을 저장한 경우는 다음으로 넘어가도 무방 합니다.
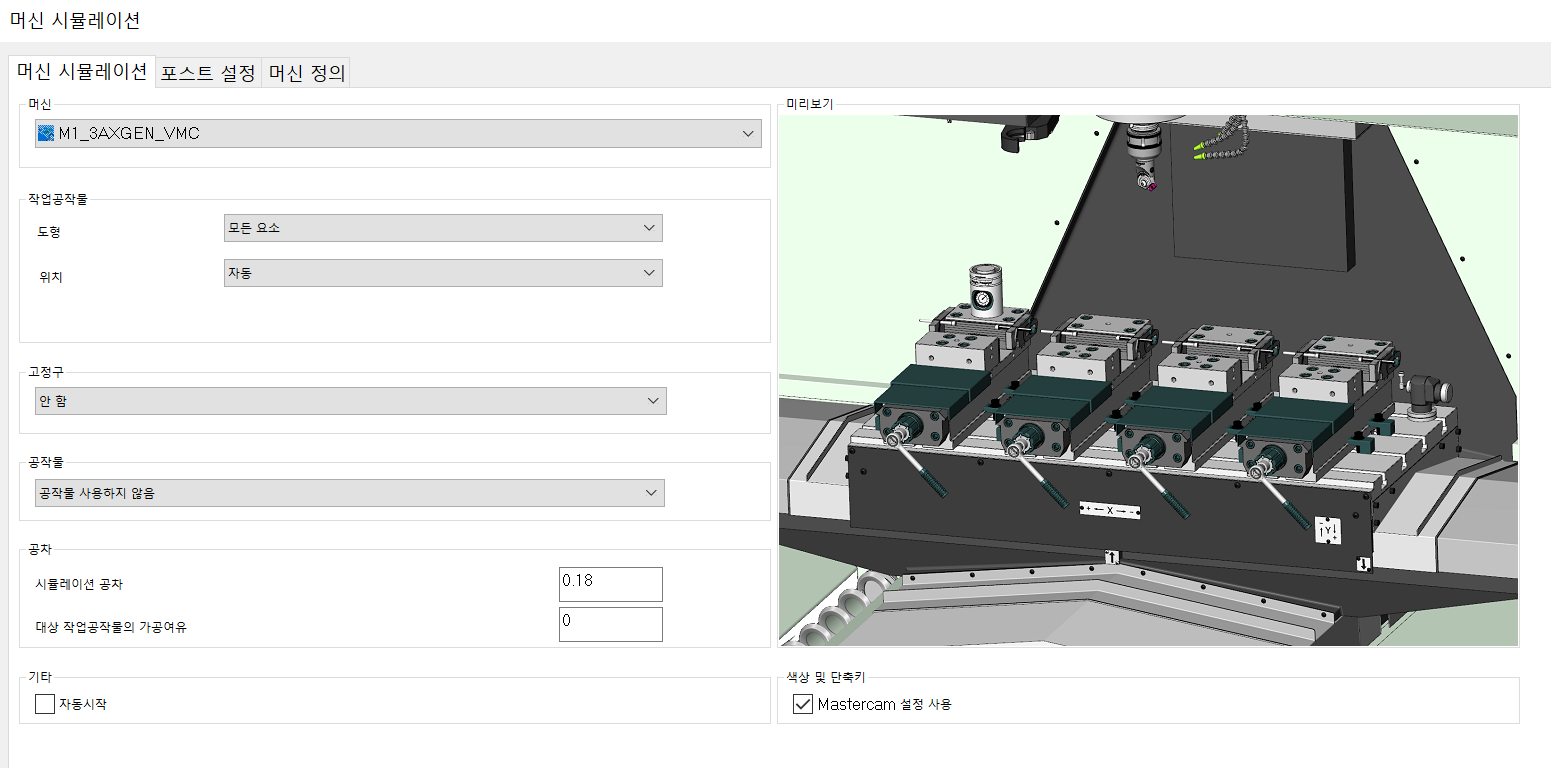
등록이 끝나면 머신 시뮬레이션 설정에 들어가면 해당 사용자 머신 시뮬레이션 정의를 선택할 수 있습니다.
여기에서 머시닝 세팅 시 필요한 액세서리(?)등을 추가하는 방법을 설명하겠습니다.
먼저 하이트 프리세트를 하나 추가 하겠습니다.
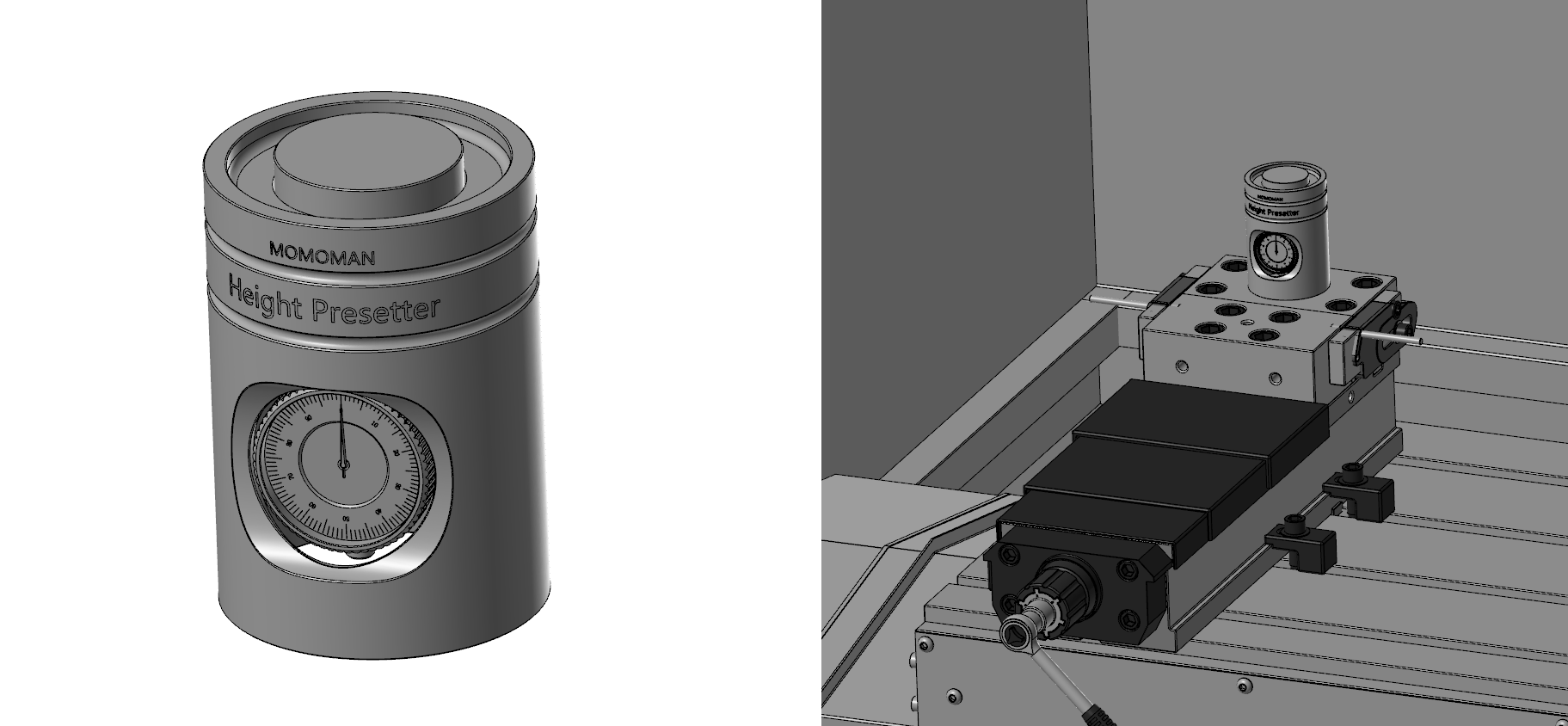
하이트 프리셋트를 모델링 후 마스터캠 해당 머신 모델링의 최초위치(기본위치 : 여기서는 1번째 바이스 고정죠 상단에 위치하겠습니다.)에 놓고 STL파일로 각각 부분별로 저장합니다.
* 물론 STL파일 저장 위치는 해당 사용자 머신정의 폴더입니다.
그리고 해당 사용자 머신정의를 오픈한 다음 머신 수정 모드로 들어갑니다.
그리고 잠시 검토 후(?) 해당 도형요소(하이트 프리세트)는 해당 장비 테이블 기준 적용(각축 이송시 어떤 도형요소에 연관 구속될것 인가?)하는것으로 하여 해당 테이블(X축 이송항목)을 선택한후 마우스 우클릭으로 옵션 메뉴 다이내믹 추가 - 단일 작업공작물 세트를 합니다.

하이트 프리셋트 몸체(고정된 기본적인 요소) 항목을 생성한 후 그것에 해당한 도형요 소을 도형 추가합니다.
그런 다음 이 하이트프리세트 몸체에 연관되는 각 이동되는 부품을 각 항목별로 생성합니다.
먼저 몸체 내부의 다이얼 게이지 몸체(회전형)를 하이트 프리세트 몸체 하위항목으로 생성합니다.
다이얼 게이지 몸체(눈금 바늘 빼고)는 회전해야 하므로(영점 조절을 위하여) 회전축 추가 - B 축으로 생성합니다.

그리고 생성된 항목(DIAL-1)에 해당 다이얼 게이지 몸체 도형요소를 도형 추가로 추가합니다.
이후 해당 항목이 회전축이 적용된 것이고 머신 정의 원점에서 떨어져 있으므로(항상 회전축 좌표는 원점에 근거) 회전 기준점 좌표를 이동시켜야 합니다.
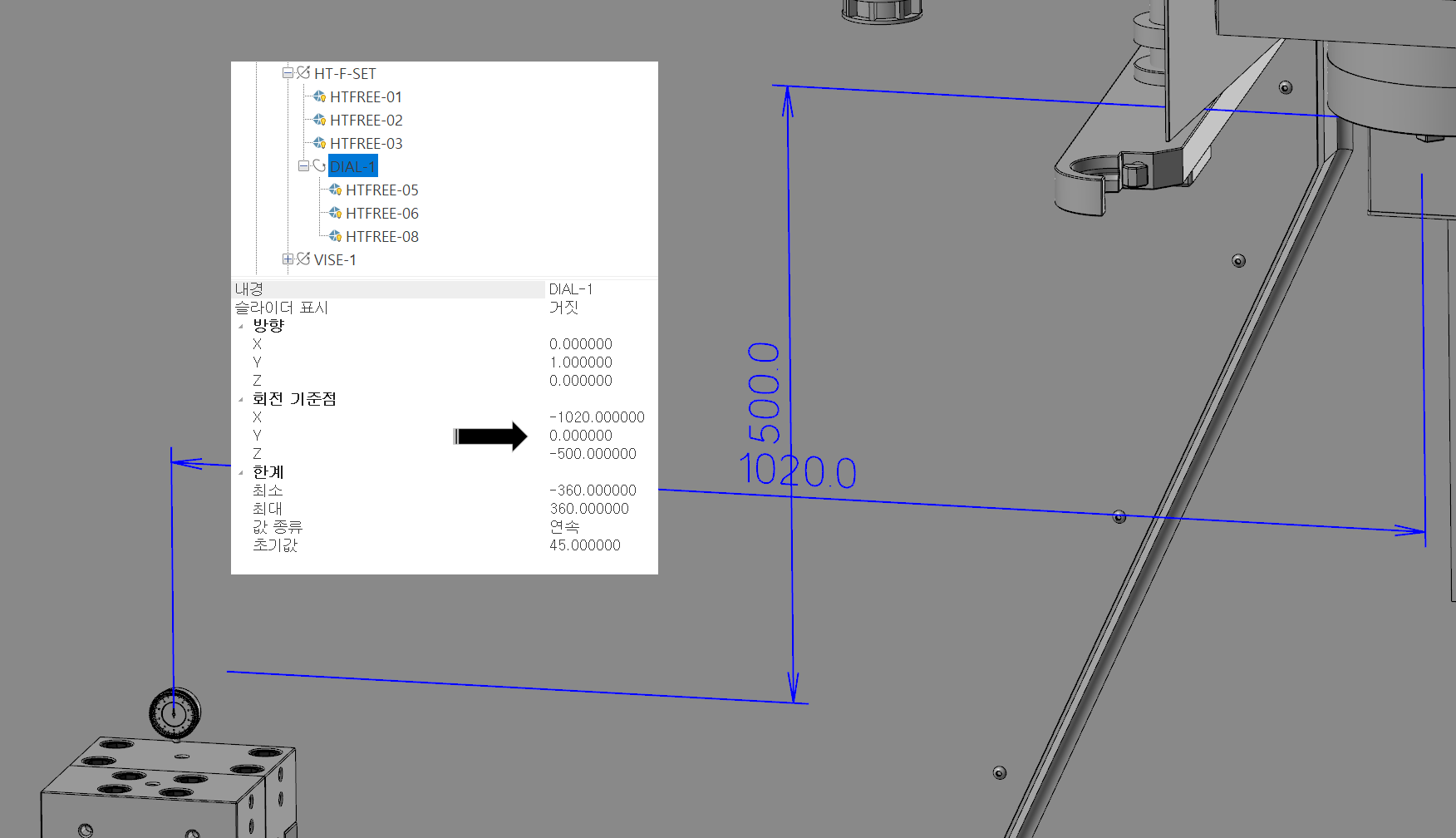
그래서 해당 항목(다이얼 게이지 몸체)의 세부항목의 회전기준점에 알맞게 입력하고 회전 한계값은 좌우 360도 까지으로 한계값을 정하고 기본값은 45도(약간 삐딱하게....)로 하였습니다.
그다음에는 다이얼 게이지의 눈금 바늘을 추가합니다.
방식은 위와 동일하게 회전축 추가 - B 축 항목으로 생성하고 바늘 도형요소를 도형 추가 합니다.
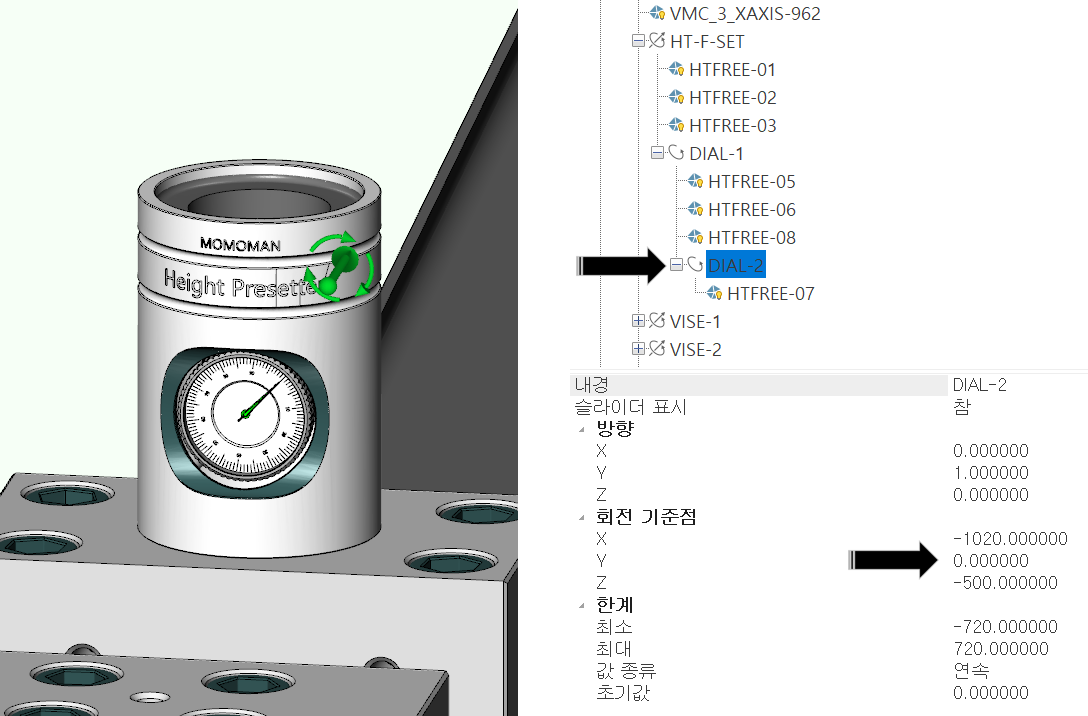
그리고 다이얼 게이지 몸체와 동일축을 사용하므로 눈금 바늘의 회전 기준점에 동일하게 입력하고 회전 한계값은 좌우 720도(2회전?)로 하고 기본값은 0으로 설정하였습니다.
마지막으로 하이트 프리세트 상부 측정면(수직 이동) 부품을 역시나 같은 방식(이번에는 이동축으로)하여 추가하면 완료됩니다.

이렇게 완성되면 머시닝 교육 과정에 하이트 프리셋 사용에 대한 교육 시 교육자료로 활용이 가능합니다.

다음에는 인디게이트를 추가해 보겠습니다.

'마스터캠 2021 기능 교육 자료(초안) > 머신 시물레이션 관련' 카테고리의 다른 글
| 마스터캠 2021 머신 시뮬레이션에 관하여-15 (머신정의 생성-6 : 부가축 머신정의(인덱스) (연동척 하드죠 동작) (1) | 2024.09.07 |
|---|---|
| 마스터캠 2021 머신 시뮬레이션에 관하여-14 (머신정의 생성-5 : 인디게이터) (12) | 2024.09.01 |
| 마스터캠 2021 머신 시뮬레이션에 관하여-12 (머신정의 생성-3 : 3축 머시닝 장비) (1) | 2024.06.30 |
| 마스터캠 2021 머신 시뮬레이션에 관하여-11 (머신정의 생성-2 : 3축 머시닝 장비) (3) | 2024.06.29 |
| 마스터캠 2021 머신 시뮬레이션에 관하여-10 (머신정의 생성-1 : 3축 머시닝 장비) (0) | 2024.05.15 |