


이번에도 저번에 이어서 아큐센터를 활용한 가공 소재의 중앙 가공원점을 측정하여 해당 장비 워크좌표계에 입력하는 방법을 알아보겠습니다.
소재 중앙에 가공원점을 설정하는 경우는 보통 잘 사용하지는 않습니다....
이유는 바이스 체결 작업이 기본인 경우 보통 바이스에 장착 한 스톱버(아데, 고정대 등등)에 기준하여 고정된 워치에서 미리 측정한 가공원점을 계속적으로 활용하거나 만일 가공원점을 가변적으로 한다 해도 보통의 경우 어느 한쪽 방향의 모서리점에 치중하여 가공원점을 설정하기 때문입니다.

* 통상 스톱버로 고정된 가공원점은 X, Y만 가능하고 일반적인 사용 시 Z값만 소재 교체 시 측정하여 입력하는 방식을 따르기도 합니다.
* 이 또한 번거롭다면 Z 원점 위치를 평행블록상단에 놓고 EXT 좌표계에 해당 소재 두께값을 넣어 사용하는 경우도 있습니다.
* 이것은 나중에 Z 축 가공원점 측정/입력하는 과정에서 다시 설명하겠습니다.

그런데 다른 경우(주로 형상 가공 또는 바이스 죠 폭보다 큰 사이즈의 소재를 주로 가공 또는 해당 소재의 중심을 기준으로 가공이 되어야 하는 형태 또는 원형 형태 또는 특정 돌출물이나 홀의 중심점을 가공원점으로 정해야 하는 경우 등)에 양센터(약칭) 라하여 이전의 X, Y 한쪽 방향에서 측정하는 방식이 아닌 X, Y 양축에서 측정하여 1/2 값(중앙) 위치좌표를 입력하는 방식입니다.
* 그렇지만 실직적으로 보면 마스터캠에서 가공원점을 소재의 중앙점에 위치하고 가공경로를 생성하였다면 그것은 양센터(중심점)에 가공원점을 설정하여 작업하라는 위미가 됩니다.
그럼 이러한 양센터(양센터가 공식명칭인지는 모르겠지만 일단 이것으로 통일해 지칭하겠습니다.)가 필요하여 적용 시 지금 까지 설명한 아큐센터 측정 방법이 아닌 다른 방법이 필요합니다.
우선 말 그대로 "양센터" 소재의 양쪽면에서 아큐센터 측정 작업을 진행하는 방식입니다.
* 물론 우리는 X, Y 두 개축 좌표값이 필요하므로 두개 방향 양쪽에서 총 4번의 야큐센터 측정이 필요합니다.

* 위 이미지처럼 소재의 X축 또는 Y축방향에서 아큐센터를 측정한 후 해당 장비의 상대좌표계에 기록된 좌표값의 거리값(이동한 거리)의 1/2(반값) 값이 해당 측정면 사이간 중심위치가 됩니다.
이것으로 해당 소재의 중심점 위치 값을 계산해 볼 수 있습니다.
* 재차 설명하지만 이러한 특성으로 해당 소재 형태는 측정 측면에서 90도 직각면을 동일하게 유지하는 다각형 또는 정원 형태 소재만 가능하다는 단점(?)이 있습니다.
우선 하나의 사각형 소재의 중심 가공원점(양센터)을 아큐센터로 측정하는 방법을 알아보겠습니다.

우선 위 이미지처럼 소재 가운데 중심점을 가공원점으로 한 공작물이 있습니다.
방식은 먼저 어느 한축(X, Y 어떤 축 시작이던 작업순서에는 관계없습니다.)을 선택 후 한쪽 방향에서(방향 순서 관계없습니다.) 아쿠센터 측정 후 다시 반대쪽 방향에서 다시 측정 후 상대좌표값을 이용하여 두 측정위치간 거리의 중심 위치 좌표값을 찾는 것입니다.
우선 X축을 일차 기준으로 오른쪽에서 왼쪽 순으로 아큐센터를 측정하겠습니다.
① 우선 아큐센터를 호출 후 소재의 오른쪽 측면을 측정합니다.

② 아큐센터 측정 후 안정된 위치(높이)로 MPG을 이용하여 이동시킵니다.
* 이때 해당 위치값(X, Y)이 변동되면 안 되므로 측정(임팩트) 후 바로 사용 MPG의 적용 축방향을 Z 축 방향으로 전환하여 바로 Z축 방향으로 수직 상승 시키시기 바랍니다.
③ 현재 상태에서 해당 장비 조작반의 모드를 POS모드로 변경하고 현재 표시되는 좌표계를 상대좌표계로 변경(하단의 소프트 키 중 "상대"를 눌러 전환)하고 현재 위치를 "X0.0"으로 입력칸에 입력 후 "프리셋" 소프트 키를 눌러 현재 상대좌표 X축을 0.0으로 만듭니다.
* 이 과정은 양 사이드 측정 시 거리값을 산출하기 위하여 우선 한쪽 좌표값을 0.0으로 만드는 과정입니다.
④ 아큐센터를 반대쪽 측면을 측정하기 위하여 MPG 또는 JOG(조그) 기능으로 이동시킵니다
그리고 적당한(가능하면 아까 반대쪽 측정했던 높이 정도로) 측정 가능 높이로 아큐센터를 내립니다.
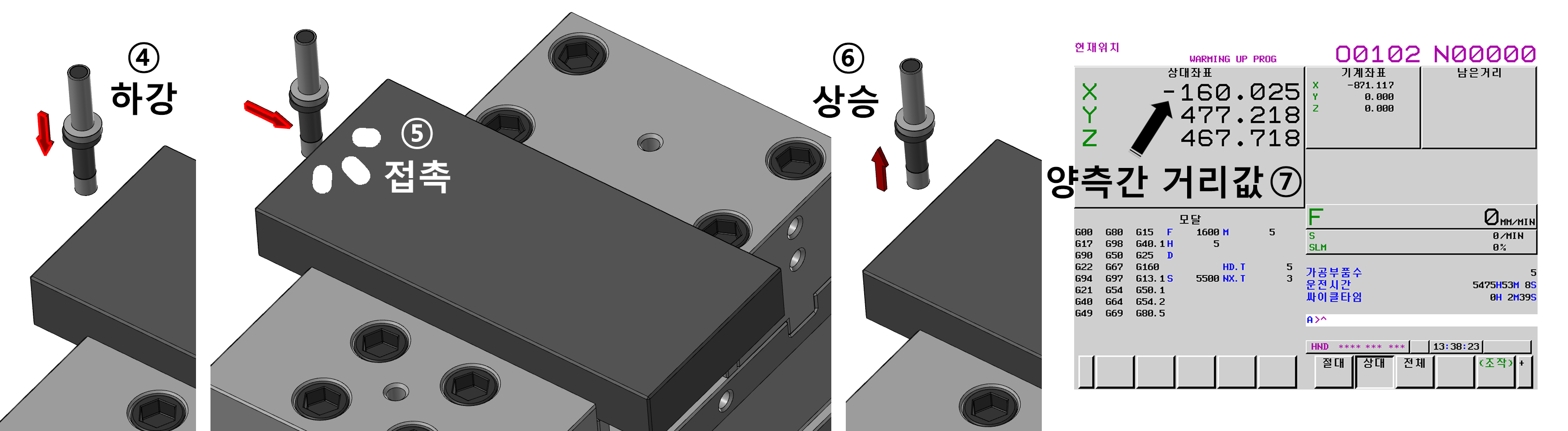
⑤ 그리고 반대쪽 측면을 측정(임팩트)합니다.
⑥ 그 상태에서 그대로 MPG를 이용하여 적당한 안전높이(곧 소재 중앙으로 이동할 것이므로 이동시 충돌위험이 없는 안전한 높이)로 아큐센터를 이동합니다.
⑦ 그 상태 그대로 현재 장비의 조작반의 POS모드의 상대좌표 값을 확인합니다.
* 예제에서는 160.025 거리값을 가집니다.
현재 위치에서 양쪽 측정한 거리값의 1/2 거리값을 되돌아가야 하므로 해당 아큐센터를 이동하거나 현재 상대좌표계에 양측 거리값의 1/2 값 위치에 해당하는 좌표값을 입력해 줄 필요가 있습니다.
여기에는 여러 가지 방법이 있습니다.
제일 간단한 방법은 암산 또는 별도의 계산기를 이용하여 1/2 값을 산출하여 그 거리값만큼 아큐센터를 이동하는 것입니다.
1. 암산 또는 계산기 사용(측정된 거리값 160.025/2 = 80.0125(80.012)) 중간값을 계산합니다.
* 이때 좌표계에 표시된 양수/음수 표시(+/-)는 무시하시고 거리값의 대한 값만 생각하셔야 합니다.
2. 그럼 중간값인 80.012 위치로 아큐센터를 MPG를 이용하여 현재 표시되는 상대좌표값을 보고 이동시킵니다.
* 이때 좌표계에 표시된 양수/음수 표시(+/-)는 무시하시고 거리값의 대한 값만 생각하셔야 합니다.
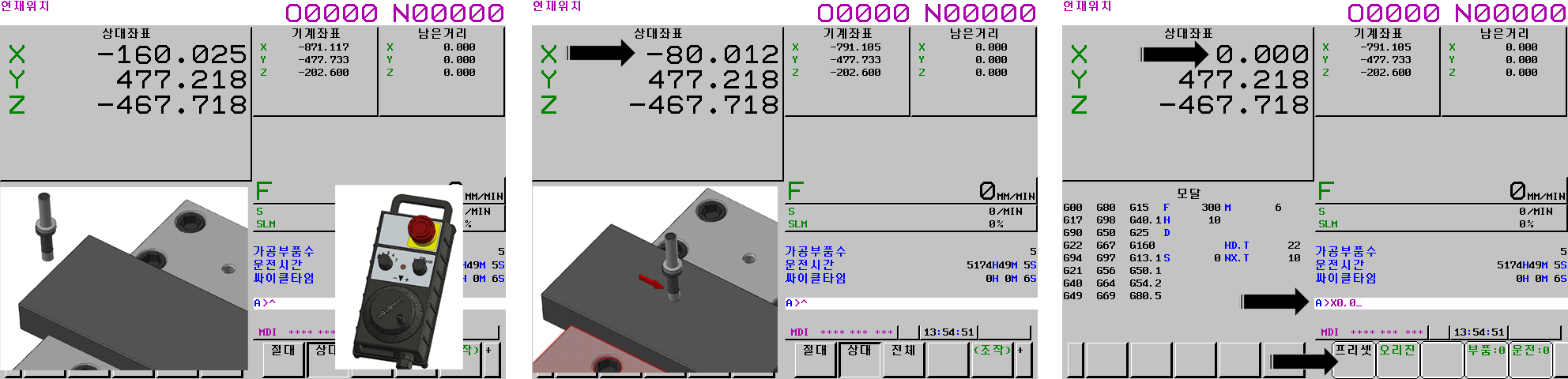
* 위 이미지 대로 현재 좌측면 측정뒤 아큐센터를 위로(안전높이)까지 올리고 MPG을 이용하여 수동으로 이송하여 X 80.012 값만큼(1/2 값) 이동한 후 상대좌표에서 "X0.0" - 소프트키 "프리셋"을 하여 현재 위치에서 상대좌표 X0.0을 설정합니다.
이것이 성공하면 현재 아큐센터의 위치는 소재의 X축상 중앙위치 값이고 상대 좌표값을 X0.0으로 지정하였으니 현재 위치가 정의되었습니다.
* 이 상태에서 바로 OFS/SET 모드의 좌표계로 가서 해당 워크좌표계의 X축 가공원점을 입력(X0.0 - "측정")하여도 무방하나 일단 상대 좌표 X0.0으로 위치를 특정할 수 있으므로 다음 Y축 까지 마무리하고 한 번에 해당 워크좌표계 X, Y축 가공원점을 입력하는 것이 보통입니다.
이것은 특별히 정해진 것은 아니므로 작업자 특성에 따라 정의하면 됩니다.
그리고 몇 가지 팁을 얘기 하면 여기서는 양쪽 측면 측정 후 계산된 중간값(1/2)에 따라 MPG을 통해서 이동하였으나 이것이 좀 귀찮은 경우(?) 이동 지령을 실행하여 이동하는 것도 가능합니다.
방식은 2가지(사실 동일합니다.) 방식을 설명하겠습니다.
우선 1번..
양쪽 측정한 거리값의 중간값을 암산 또는 별도의 계산기을 통해서 산출되었다면.(양쪽 측정 간 거리값이 160.025 이므로 1/2 값은 80.012입니다.) 이 값을 이용하여 조작반의 화면을 MDI - PROG 모드로 전환하고 해당 지령문 입력칸의 "G91 X80.012"을 입력 후 스타트 버턴을 눌러 실행합니다.
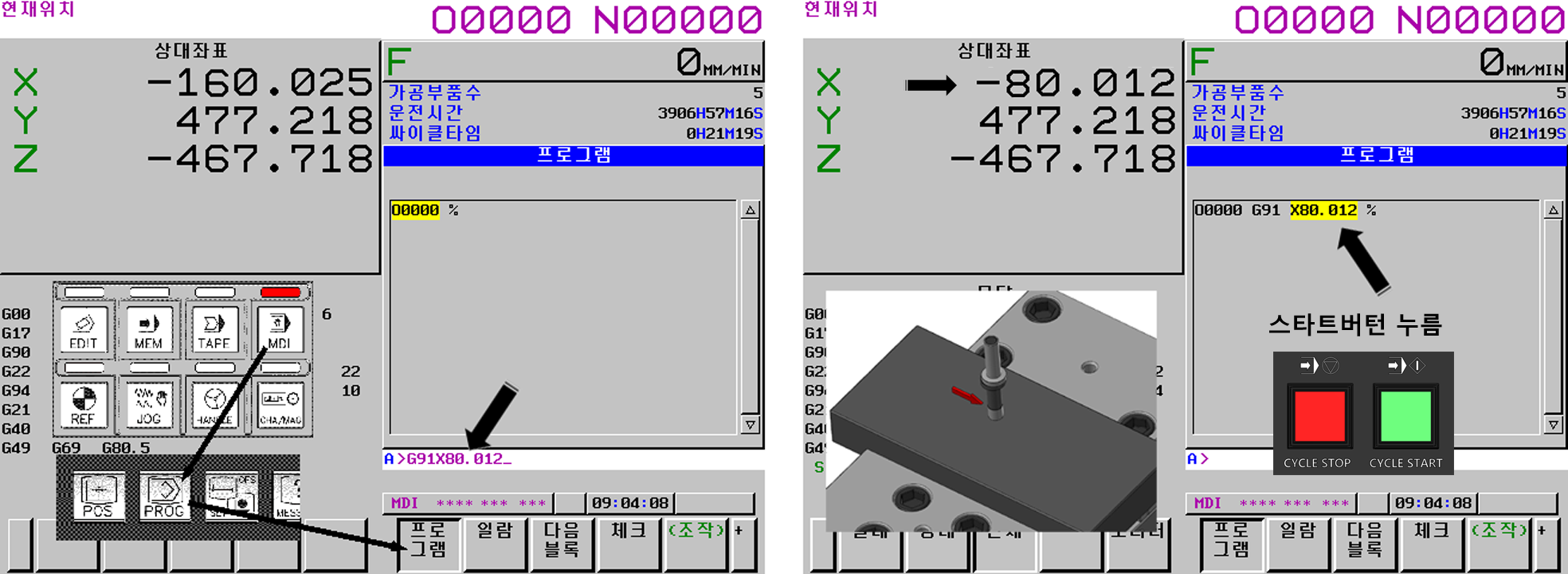
* 이 상태에서 상대좌표 값 X0.0으로 전환하고 나중에(Y축도 중앙좌표값 산출 후) 워크좌표계에 X, Y축 좌표값을 "측정" 기능으로 입력합니다.
다만 이러한 방법을 사용하면 측정된 거리값을 1/2 값으로 계산하는 과정(암산 또는 계산기 사용)이 사용자 실수로 인한 잘못된 값을 입력하는 실수가 발생할 수 있습니다.
(휴면 에러..)
2번 방식..
그래서 앞서 방법에서(중간 위치로 이동하는 MDI 모드 지령문 입력 시) 중간 좌표값을 연산하는 연산방식 이동 지령문을 입력하는 방법을 생각해 봅니다.
즉 아까 양쪽 측정 거리값이 160.025 인경우 앞서 작업자가 계산해서 1/2 값을 입력하지만 연산식을 넣어서 이동을 지령하는 방식입니다.
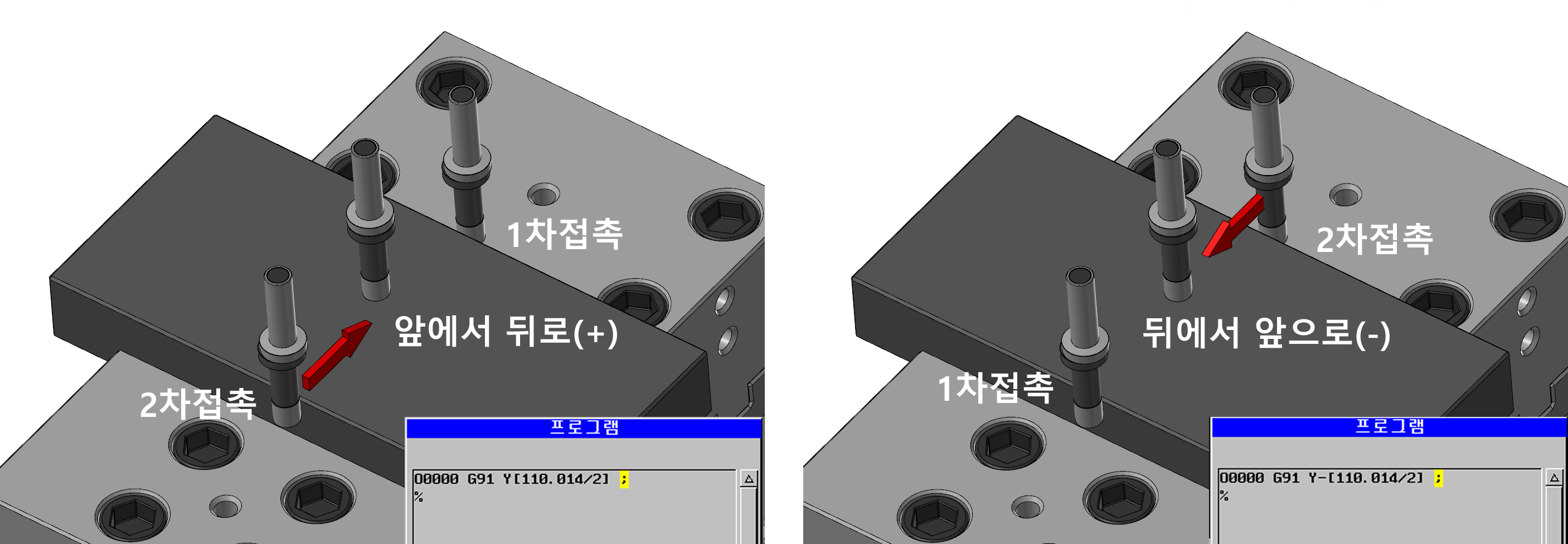
이전 거리값 160.025 / 2 = 80.012 산출을 이동 지령문 G91 X [160.025/2]; 로 입력합니다.
* 이때 주의사항이 앞서 양쪽 측정한 순서 방향(우 > 좌 / 좌 > 우)에 따라 지령문의 해당 축 부호(-/+)를 구분하셔야 합니다.
즉 머시닝 상대좌표계상(화낙 시스템 기준) 우에서 좌로 가면 반대로 되돌아와야 하므로 플러스(+) 값으로 이송 지령을 해야 하며 좌에서 우로 가면 반대로 되돌아 오므로 마이너스(-) 값으로 이송 지령을 해야 합니다.
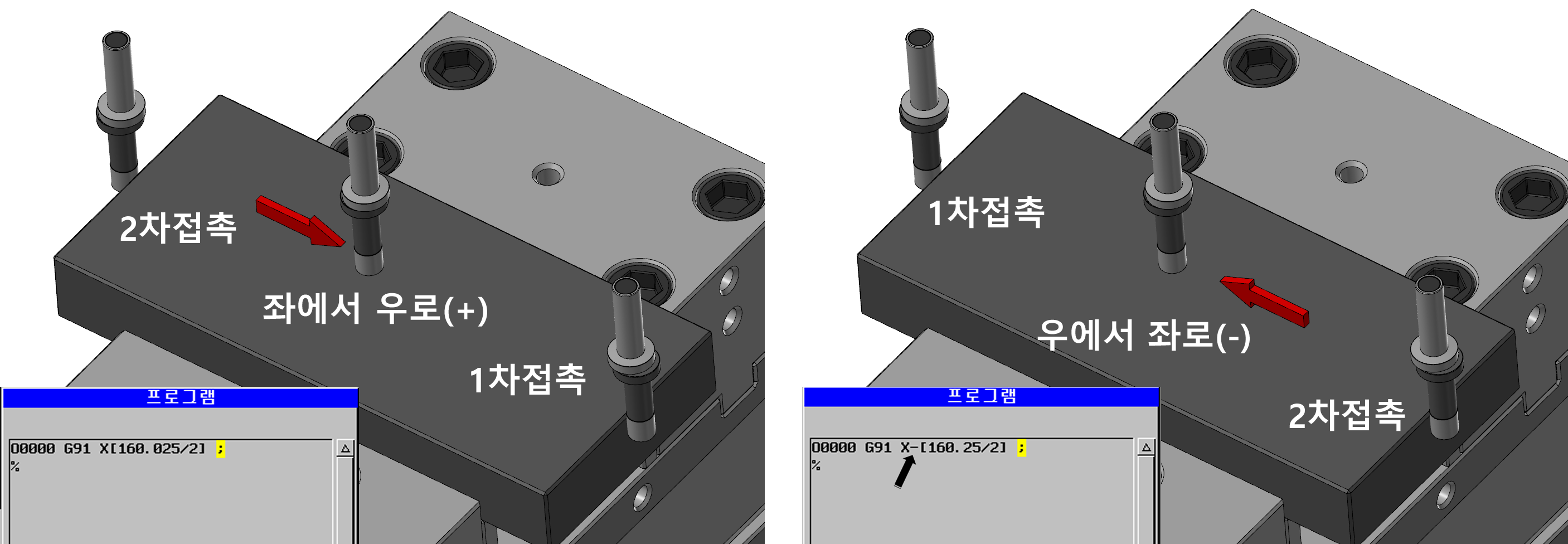
* 위 이미지의 숫자는 예제로서 실제 작업 시는 측정 실제 거리값을 넣으셔야 합니다.
* 보통 이 상태에서 상대좌표계 X축 값을 0.0으로(X0.0 입력 - 프리셋) 설정하고 다음 Y축으로 넘어갑니다.
Y축 방향도 X축과 동일한 방법으로 양측 측정하고 가운데로 이동시킵니다.
* 항상 좌표계에 따른 테이블 이송방향은 숙지하시고 작업하시기 바랍니다.

* 위 이미지처럼 기본적인 테이블 이송방향은 위와 같습니다.
(보통의 경우 테이블 정면에 이송방향 화살표 표기가 되어 있습니다.)
그럼 이러한 양센터 측정 방법을 진행하면 최종적으로 위와 같이 되어야 합니다.
즉 현재 아큐센터(스핀들 축) 위치가 해당 소재 중앙위치에 있어야 하고 해당 상대좌표계 값이 X0.0 Y0.0이 되어 있어야 합니다.
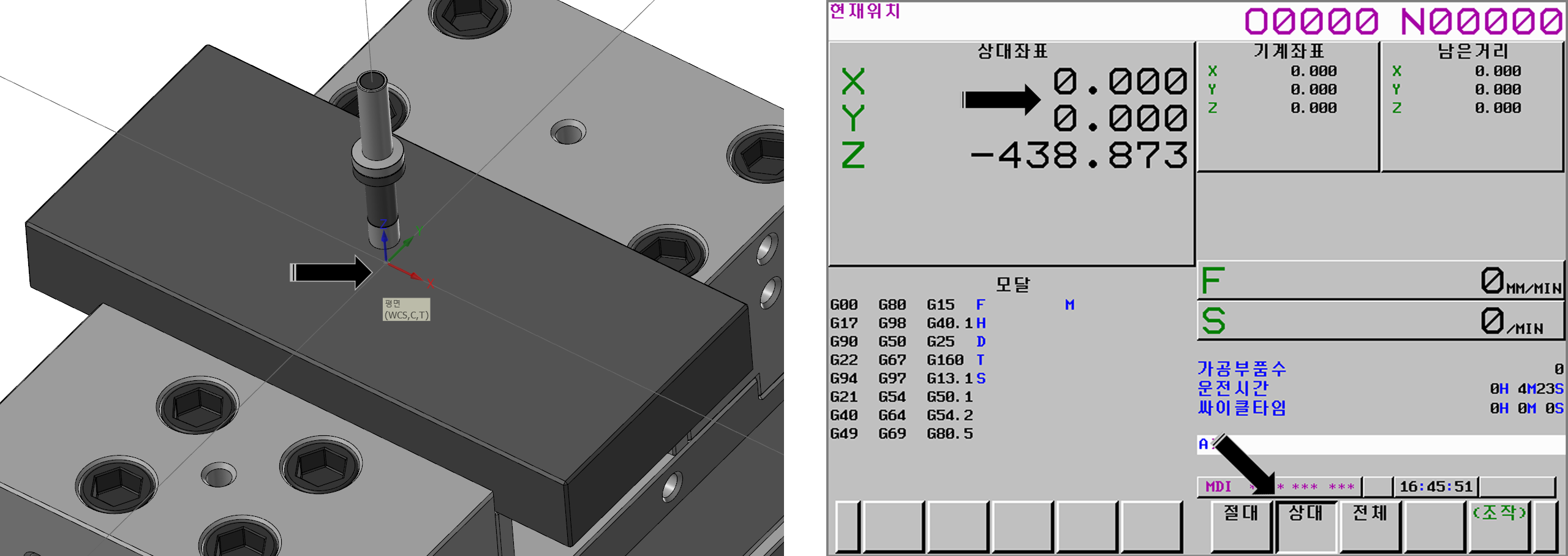
*위 이미지처럼 현재 아큐센터위치가 소재 중앙위치에 있고 현재 좌표계 모드가 상대좌표계인 상태에서 X0.0 , Y0.0을 프리셋 기능으로 되어 있는 상태입니다.
* 물론 밑에서 애기 하지만 반드시 아큐센터 위치가 소재중앙(X0.0, Y0.0)이 아니더라도 해당 소재중앙 좌표값을 해당 워크좌표계에 입력가능합니다.
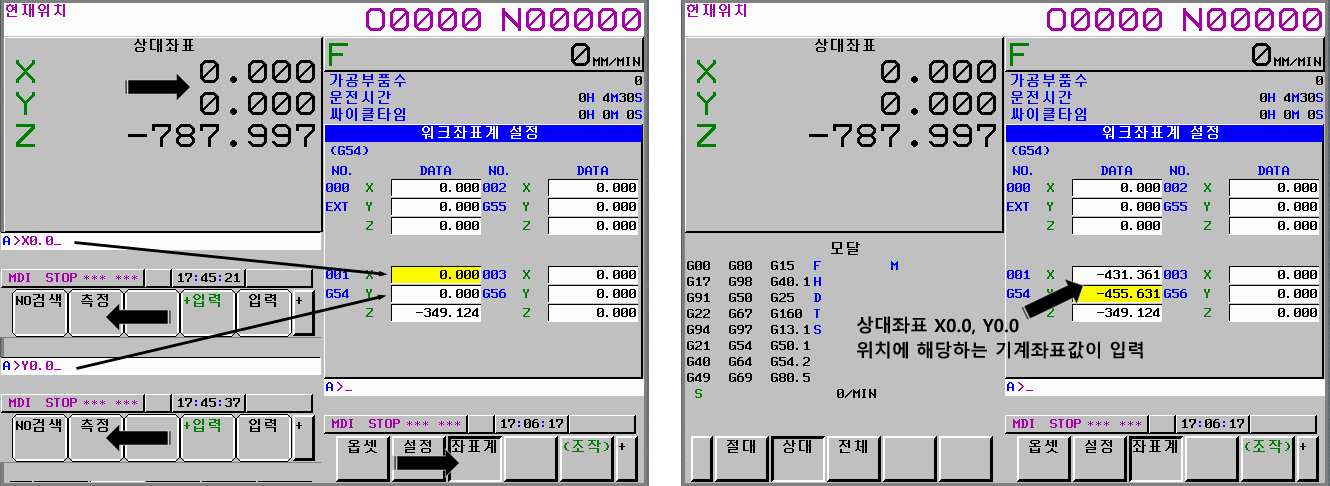
그럼 이 상태에서 OFS/SET 화면에서 좌표계로 들어가서 입력칸에 X축 "X0.0" , Y축 "Y0.0"을 입력하면 해당 상대좌표 X0.0, Y0.0에 해당하는 기계좌표값이 입력됩니다.
* 이러한 관계로 아큐센터는 상대좌표 X0.0, Y0.0 위치에 계속 있어야 합니다.
(만일 움직이면 다시 상대좌표값을 확인하여 다시 제위치로 이동하고 워크좌표계에 입력하여야 합니다.)
(이러한 이유로 항상 입력 시 해당 조작반 화면상태를 확인하면서 조작하셔야 합니다.)
(단순히 1번 누르고 2번 누르고 3번 누르고 이렇게 기억하시면 안 됩니다.)
(또한 다른 이유로 머시닝 장비가 타업체장비로 변경 시 조작반 조작상태가 조금씩 틀립니다.)
번외로 조금 빨리 하여야 하는 상황(그렇다고 많이 차이 나는 것 은 아닙니다.)이면 아래와 같이 해당 소재 중앙위치값을 워크좌표계에 입력 가능합니다.
즉 해당 중간값 산출이 가능한 순서까지 진행(양쪽 측면 측정) 한 상태에서 해당 거리값의 1/2 값을 산출(현상태에서는 움직이면 안 되므로 암산 또는 계산기를 사용하여 계산) 한 후 그 값을 바로 OSF/SET - 좌표계 해당축+1/2 거리값을 입력하시면 됩니다.
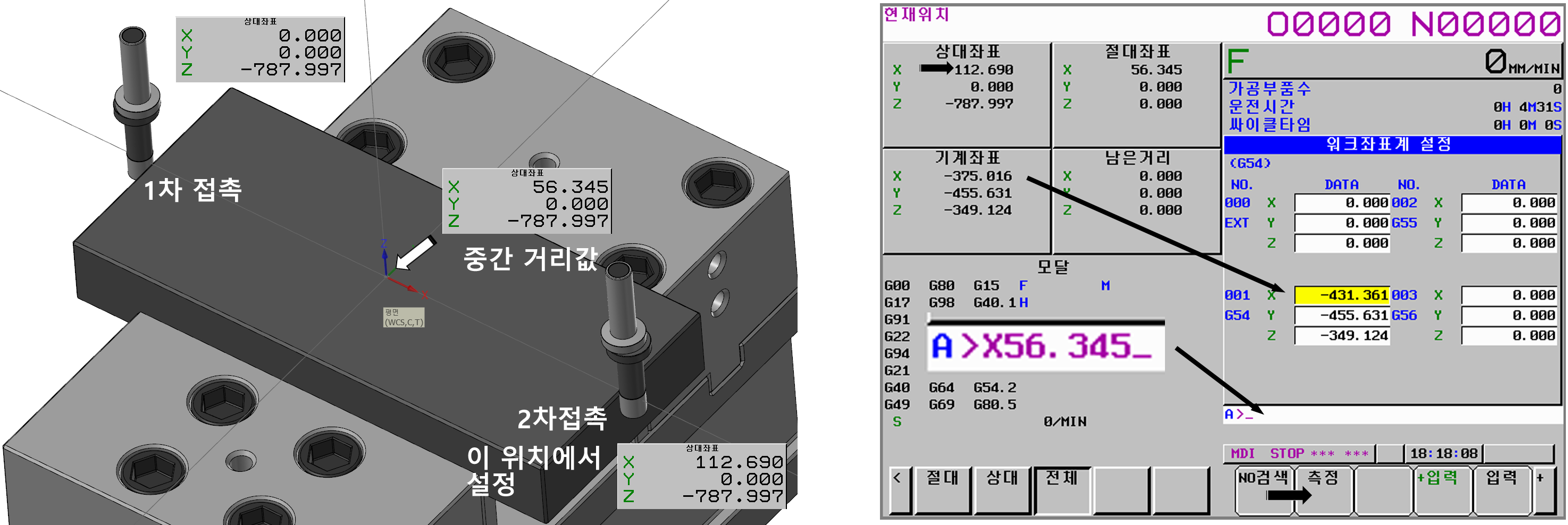
예로서 좌에서 우로 측정한다고 하고 측정 거리값은 112.69 / 2 = 56.345(중간값)일 경우 이러한 중간값을 암산이나 계산기로 산출 후 2차 접촉 위치(안전 높이로 이동한 후) 그대로 상태에서(상대좌표 : X112.69) 바로 OFS/SET - 좌표계 워크좌표계에서 거리중간값(56.345)을 바로 입력해 버리는 것입니다.
즉 현재 위치가 가공원점에서 입력된 값만큼 떨어져 있다 그러므로 네가 계산하여 X0.0(상대좌표 X56.345 위치)에 해당하는 기계좌표값을 가공원점으로 적용하는 방법입니다.
이러면 굳이 아큐센터를 이동하여 가운데 위치로 이동하면 상대좌표값을 X0.0으로 설정하는 과정 없이 바로 가공원점을 설정할 수 있습니다.
* 다만 단점이 상대좌표계는 가공원점을 X0.0, Y0.0으로 설정이 안 되고(절대좌표는 자동으로 가공원점을 기준으로 재설정됩니다.) 그대로 남아 있으므로 자동운전 또는 조작 시 절대좌표계를 기준으로 좌표값을 확인해야 하는 단점과 중간 거리값을 암산 또는 계산기로 산출하여 입력하므로 이러한 입력과정에서 사용자 실수를 체크할 수 있는 방법이 사실상 없습니다.
( 그러므로 특별한 일이 없는 한 익숙해질 때까지는 기본 방식을 적용하여 조작하는 것을 권장합니다. )
그러므로 이러한 문제점 가공원점 설정은 빨리 하고 싶고 또한 조작 또는 중간거리값 연산 등의 사용자 실수를 방지할 수 있는 방법으로 양센터 매크로 사용방법이 있습니다.
https://momoman83.tistory.com/524
머시닝 관련 초 기초사항 익히기 과정 - 09(양센터 매크로 사용법-1)
이번에는 머시닝 작업 중 소재규격 센터점을 가공원점으로 하는 경우에 사용되는 양센터 매크로에 대하여 사용법 위주로 설명하겠습니다. 먼저 사용 매크로는 2가지 입니다. 마캠
momoman83.tistory.com
* 위 매크로 사용은 기본적으로 초보자분들에게는 권장하지 않습니다.
(일단 무조건 현재 작업환경에 익숙해진 다음에 좀 더 작업성 향상을 위하여 노력한다면 고려해 볼 수 있습니다.)
*만일 각 작업환경상 처음부터 이러한(난이도 있는(?))조작법(아큐센터)을 요구하는 경우에는 그 작업환경에 맞게 적용하고 숙지 이해 하시면 됩니다.
'3개월 미만 초보자 가 보는 머시닝 교재 (초안본)' 카테고리의 다른 글
| 머시닝 관련 초 기초사항 익히기 과정 - 15(화낙 조작반 가동 상태 표시바의 표시사항 설명) (1) | 2025.02.01 |
|---|---|
| 머시닝 관련 초 기초사항 익히기 과정 - 14(아큐센터 사용 가공원점 입력-5) (0) | 2025.01.30 |
| 머시닝 관련 초 기초사항 익히기 과정 - 12(아큐센터 사용 가공원점 입력-3) (2) | 2025.01.16 |
| 머시닝 관련 초 기초사항 익히기 과정 - 11(아큐센터 사용 가공원점 입력-2) (3) | 2025.01.12 |
| 머시닝 관련 초 기초사항 익히기 과정 - 10(아큐센터 사용 가공원점 입력-1) (2) | 2025.01.04 |